1138
为什么从3D /第3部分纠缠角度头疼
S3D:不痛的增益 I>

这是第三条在一系列的“为什么3D从一个头痛的问题。”在的第一部分它是关于影院设备中的第二 - 的膜的问题,最后,在这里和下面的概述,将被处理的具体问题。让我们开始用最简单的理解,并且最痛苦的感知1 - 纠缠角度,当右眼图像被馈送到左和向左 - 向右侧。很难用语言来传达经历,当他们看到这幅画的大脑相应部位的感觉......但我们还是尝试一下。 )
问题的根源
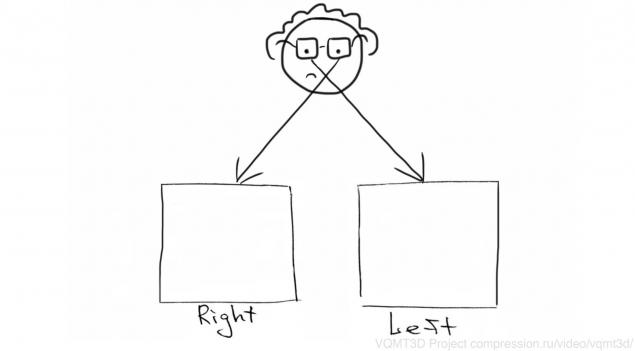
当左眼图像被馈送到右侧,反之亦然,我们看到一个图像,它是在现实中是不可能的事情应该被看作是一种更亲密的,反之亦然。那些。对象好像里朝外。通常情况下,发生此问题,错误安装。这是非常重要的,了解的主要事情:解决这个特定问题 - 小学,规模比大多数其他错误,这是在第二部分讨论更加的简单。这个错误不纠正正是因为如果你的大脑已经练就立体声差,他非常成功地弥补了这一问题:人们往往看到的图片,甚至用了三个维度的“正确”的元素,但主观上更加“扁平化”比它应该是。那些。我们的大脑努力承认“不可能”的形象,并有足够的培训,可怜的立体场景此类通知。
是人脑的明确规定,给大家介绍一下,在十九世纪的美国加州乔治·斯特拉顿大学度过了实验。他有很多有趣的经历,其中包括相当困难当图像是由于与反射镜,其被固定在头部的喷嘴,完全颠倒:
28822576
实验进行了数天,并在初期,即使最简单的任务,如采取任何东西,或进入下一个房间,不接触家具,造成了严重的困难。但在第三天,情况有所好转:“虽然走在家具之间的狭窄缝隙,我需要少得多的关注比以往。当我在写,我可以很容易看你的手,没有出现不适。“第五天斯特拉顿能走动的房子等等。D.有趣的是,当他把本机上的第八天,只用了两个小时的视觉系统“改编回到”正常感知。与此同时,当重新安装装置的时间来适应的“错误”的图像也被显着减少。这些有趣的实验了很多,在二十世纪以后,包括。
鸡菲斯特棱镜,折射进入她的眼睛光 H6>此外,类似的实验进行了后来与各种动物 - 。与鸡/母鸡,小猫/猫,猴子等D.一个有趣的这些结论是人脑是比动物的大脑得多适应性和人能够更成功地适应的“不可能”的图像,即使是在与猴子比较。

这是第三条在一系列的“为什么3D从一个头痛的问题。”在的第一部分它是关于影院设备中的第二 - 的膜的问题,最后,在这里和下面的概述,将被处理的具体问题。让我们开始用最简单的理解,并且最痛苦的感知1 - 纠缠角度,当右眼图像被馈送到左和向左 - 向右侧。很难用语言来传达经历,当他们看到这幅画的大脑相应部位的感觉......但我们还是尝试一下。 )
问题的根源

当左眼图像被馈送到右侧,反之亦然,我们看到一个图像,它是在现实中是不可能的事情应该被看作是一种更亲密的,反之亦然。那些。对象好像里朝外。通常情况下,发生此问题,错误安装。这是非常重要的,了解的主要事情:解决这个特定问题 - 小学,规模比大多数其他错误,这是在第二部分讨论更加的简单。这个错误不纠正正是因为如果你的大脑已经练就立体声差,他非常成功地弥补了这一问题:人们往往看到的图片,甚至用了三个维度的“正确”的元素,但主观上更加“扁平化”比它应该是。那些。我们的大脑努力承认“不可能”的形象,并有足够的培训,可怜的立体场景此类通知。
是人脑的明确规定,给大家介绍一下,在十九世纪的美国加州乔治·斯特拉顿大学度过了实验。他有很多有趣的经历,其中包括相当困难当图像是由于与反射镜,其被固定在头部的喷嘴,完全颠倒:
28822576
实验进行了数天,并在初期,即使最简单的任务,如采取任何东西,或进入下一个房间,不接触家具,造成了严重的困难。但在第三天,情况有所好转:“虽然走在家具之间的狭窄缝隙,我需要少得多的关注比以往。当我在写,我可以很容易看你的手,没有出现不适。“第五天斯特拉顿能走动的房子等等。D.有趣的是,当他把本机上的第八天,只用了两个小时的视觉系统“改编回到”正常感知。与此同时,当重新安装装置的时间来适应的“错误”的图像也被显着减少。这些有趣的实验了很多,在二十世纪以后,包括。