1368
MeArm:robomanipulyator“自己动手”
MeArm - 工业机器人的袖珍版。这opersorsny项目 - 所有关于设计和程序文件可以免费下载的数据是根据知识共享许可,这样你就可以对其进行编辑,并从他们身上学到
。
MeArm旨在使更多的可用机器人。所有的开发,使用该收钱<一href="https://www.kickstarter.com/projects/phenoptix/mearm-pocket-sized-industrial-robotics-for-everybo">Kickstarter,将被放置在Creative Commons,它允许使用被许可在网络上,从他们为榜样,学习的编辑和创建你自己的设备。
目前群众募资带来13649磅所需的5 000
的
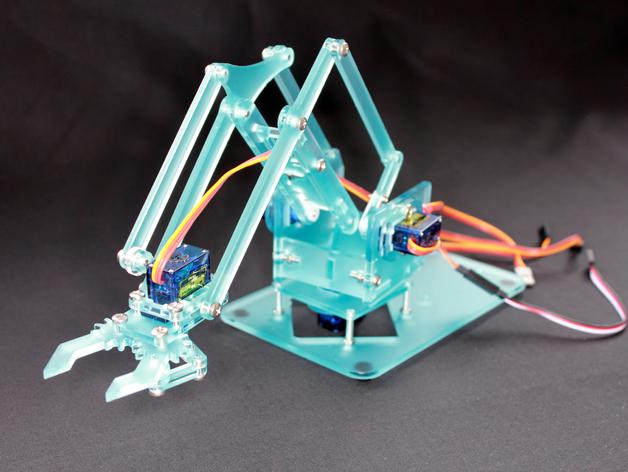
操作过程中MeArm手。
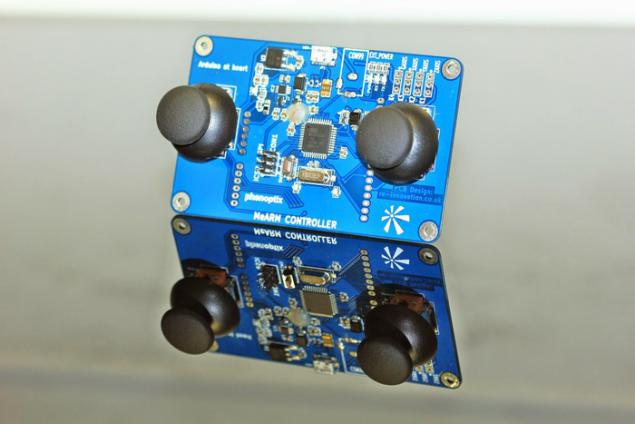
Aruino兼容的控制器MeBrain。之后,控制器连接到机械手MeArm可以管理它,以及记录的运动。

车间MeArm在伦敦科学博物馆。

车间MeArm在台湾。

来源: geektimes.ru/post/243633/
。

MeArm旨在使更多的可用机器人。所有的开发,使用该收钱<一href="https://www.kickstarter.com/projects/phenoptix/mearm-pocket-sized-industrial-robotics-for-everybo">Kickstarter,将被放置在Creative Commons,它允许使用被许可在网络上,从他们为榜样,学习的编辑和创建你自己的设备。
目前群众募资带来13649磅所需的5 000
的
操作过程中MeArm手。
Aruino兼容的控制器MeBrain。之后,控制器连接到机械手MeArm可以管理它,以及记录的运动。


车间MeArm在伦敦科学博物馆。

车间MeArm在台湾。

来源: geektimes.ru/post/243633/