685
步行从回形针甲虫。
将在18图片+ 1的视频,请不要折断。
续有趣的自制。在这个时候,如果你有一箱文件夹的躺在身边,电机,一对齿轮和电池,则一两个小时在这里,你可以在这里煮了这个错误。
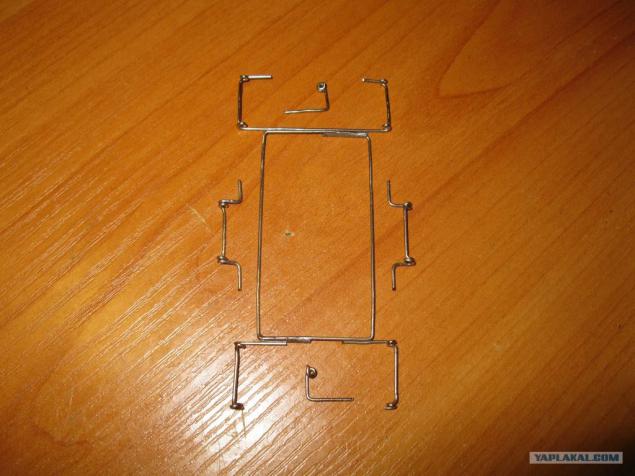
使该帧。

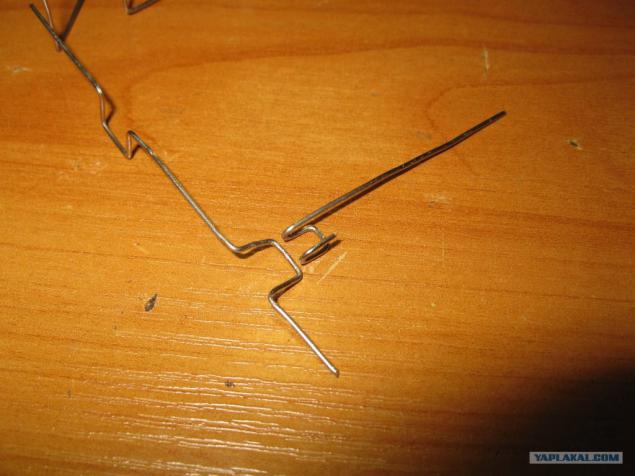
再下腿和曲轴角度的循环。
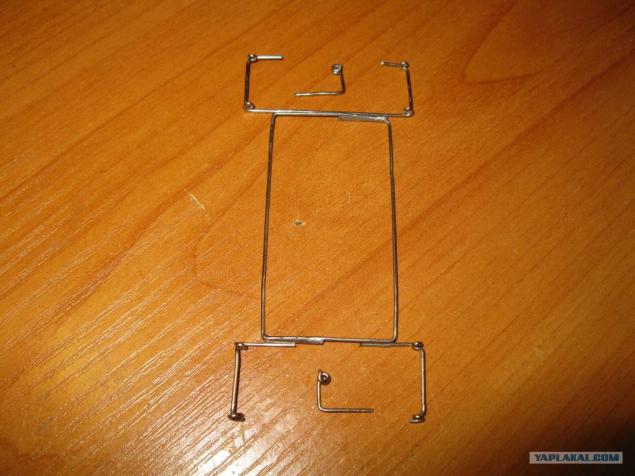
当我们做一个环在中间的腿。
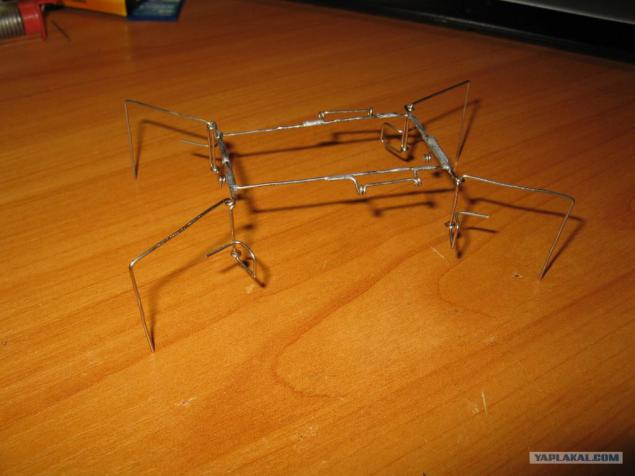
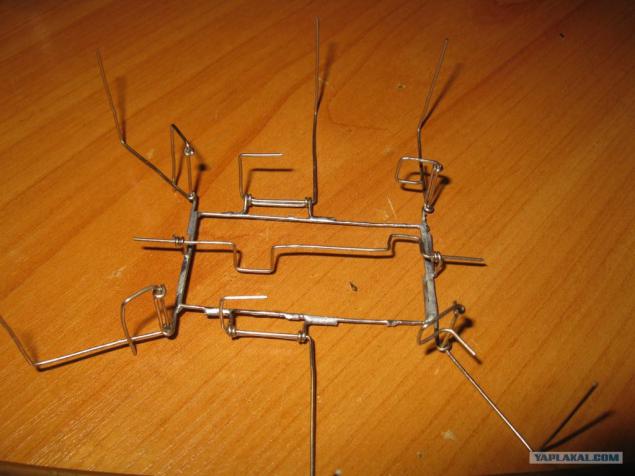
焊接此事框架。
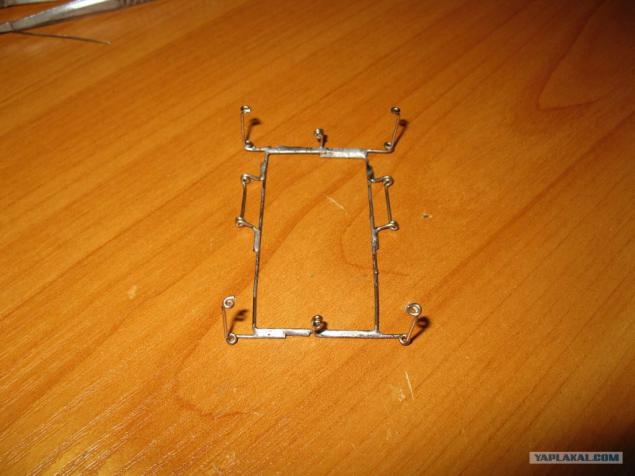
从不同的角度。
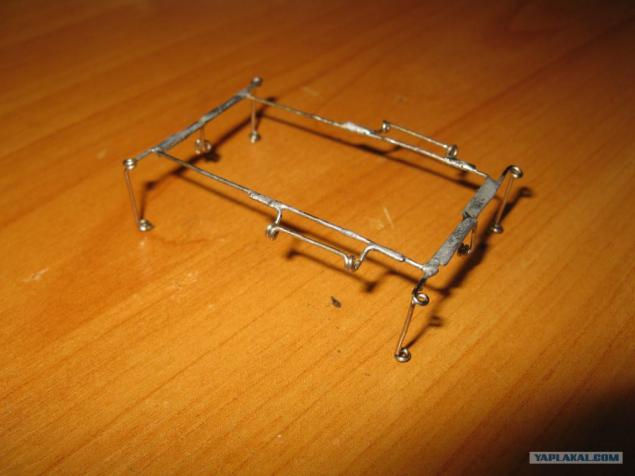
这四个片段做角腿。

尝试在框架上。
并设置。
从不同的角度。
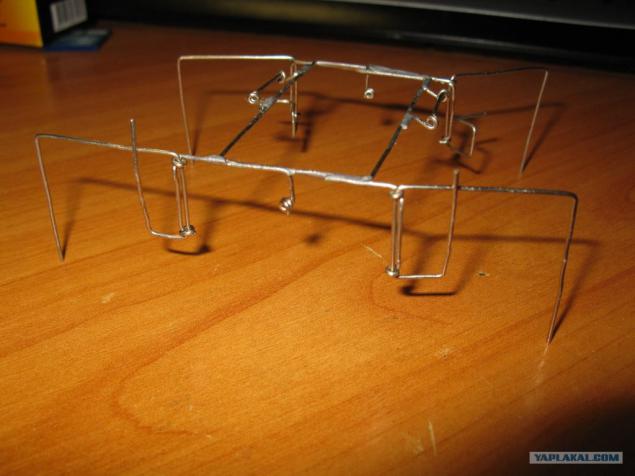
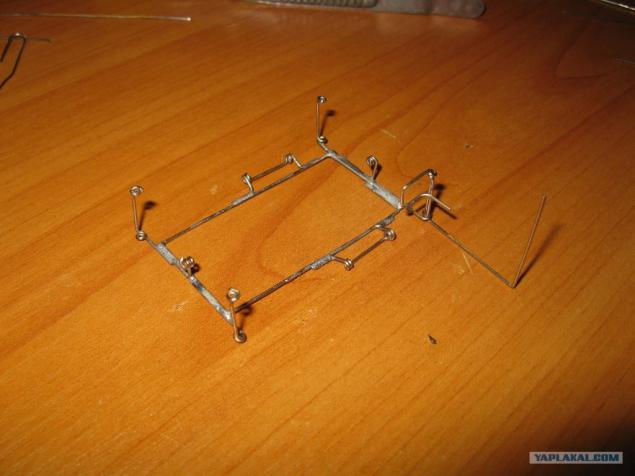
这两个片段做平均的腿和插入为他们做出的循环。
精心拉直的曲别针做曲轴。
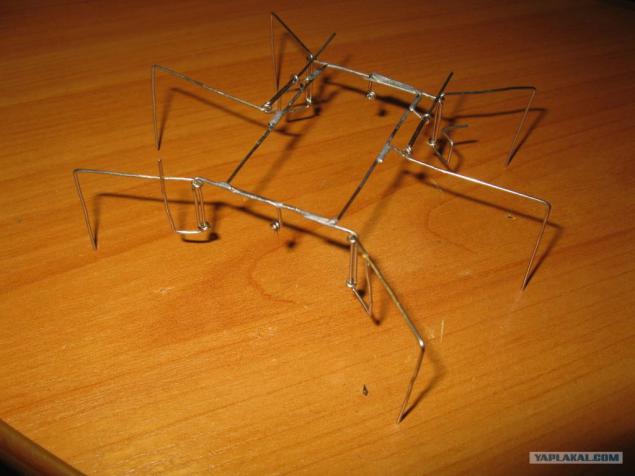
其结果是,我们得到这样的事情。
然后,我们生产Tuyev Khuchua的连杆与曲轴的爪子。
其结果是这样的。底视图。中间的照片做了,因为这是一个很长的时间来解决。
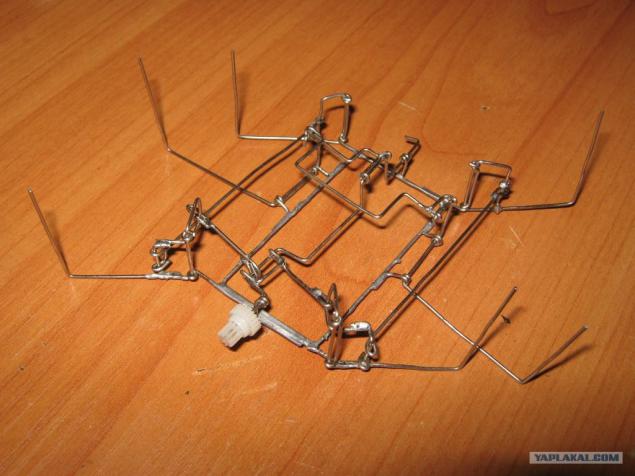
从上面。
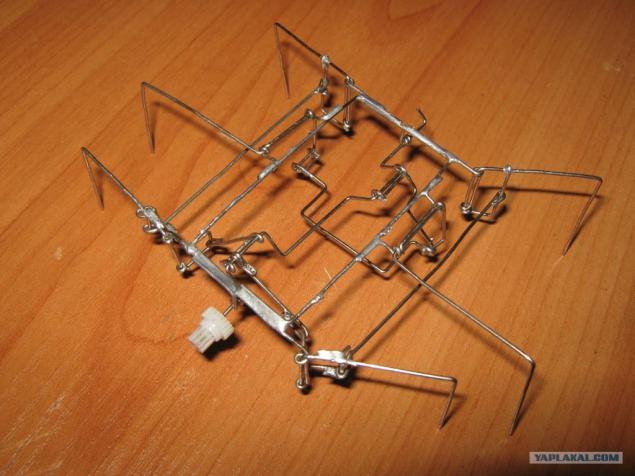
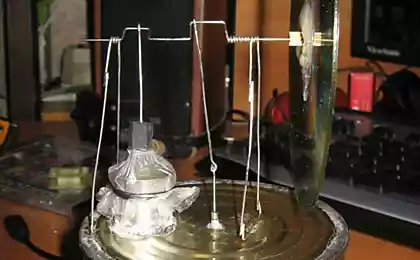
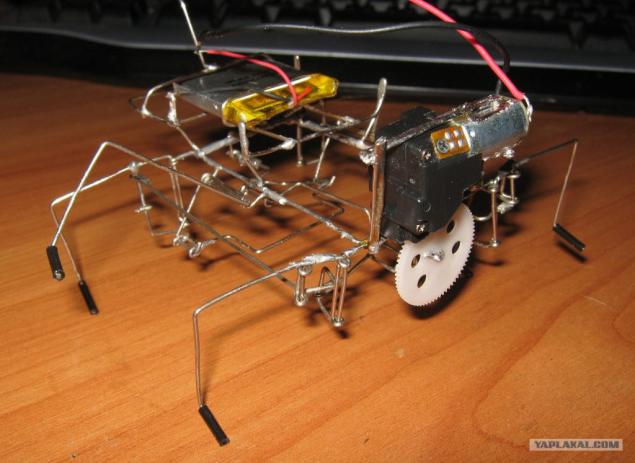
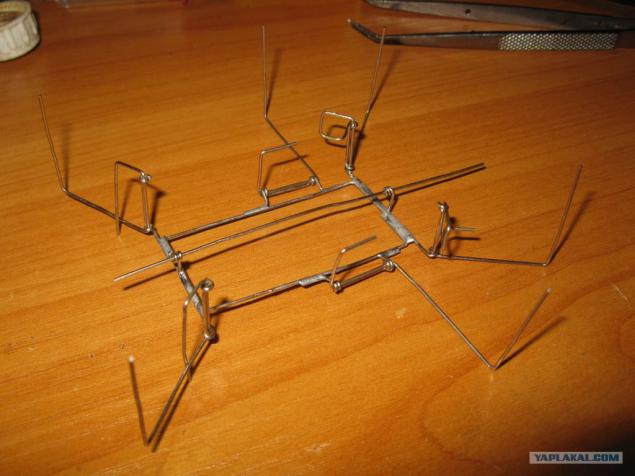
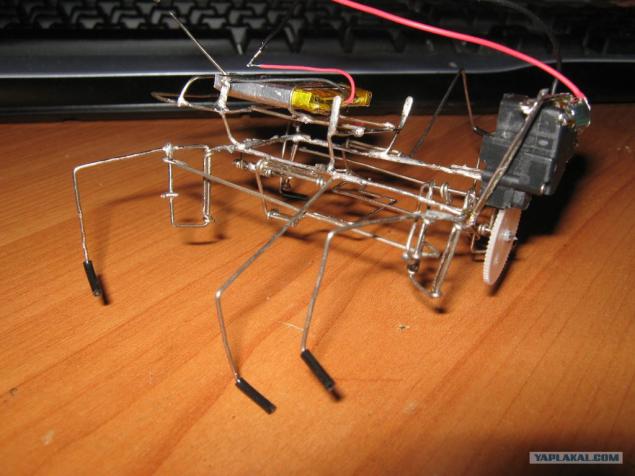
而一个小实验用齿轮及齿轮,连接后的电池拿到这里等zhukohoda。而我们的昆虫不滑了他的腿礼服缩管。
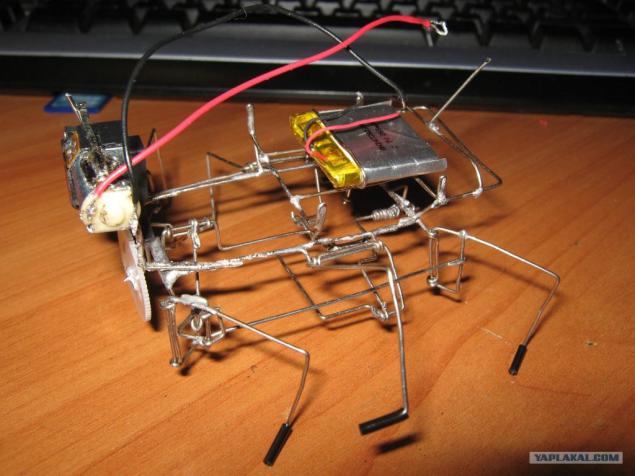
而从另一面。
发表在[mergetime] 1329435354 [/ mergetime]
嗯,一点点的视频。这与其说是一个指南,作为所做的工作一个小型的报告。如果您有兴趣,我可以给指的是总成的细节。
资料来源:
续有趣的自制。在这个时候,如果你有一箱文件夹的躺在身边,电机,一对齿轮和电池,则一两个小时在这里,你可以在这里煮了这个错误。

使该帧。

再下腿和曲轴角度的循环。

当我们做一个环在中间的腿。

焊接此事框架。

从不同的角度。

这四个片段做角腿。

尝试在框架上。

并设置。

从不同的角度。

这两个片段做平均的腿和插入为他们做出的循环。

精心拉直的曲别针做曲轴。

其结果是,我们得到这样的事情。

然后,我们生产Tuyev Khuchua的连杆与曲轴的爪子。

其结果是这样的。底视图。中间的照片做了,因为这是一个很长的时间来解决。

从上面。

而一个小实验用齿轮及齿轮,连接后的电池拿到这里等zhukohoda。而我们的昆虫不滑了他的腿礼服缩管。

而从另一面。
发表在[mergetime] 1329435354 [/ mergetime]
嗯,一点点的视频。这与其说是一个指南,作为所做的工作一个小型的报告。如果您有兴趣,我可以给指的是总成的细节。

资料来源: