1067
Manipulador curiosidad puede continuar la próxima semana
Debido al corto-circuito probables algunas limitaciones en las operaciones futuras

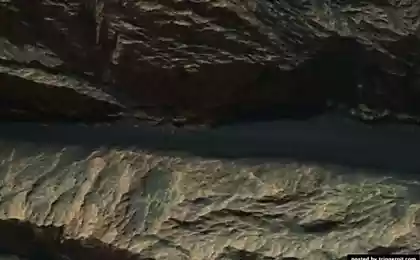
Foto de 4 de marzo de 2015, de la posición en la que se vio obligado el rover se quedó unos días. NASA/JPL-Caltech/MSSS
Los miembros del equipo Curiosidad сообщают la posible inclusión de la unidad de brazo robótico después de un corto circuito la semana que viene. Análisis de los problemas continuará
.
Carrera "Kyuriositi" más de una semana se encuentra amenazada: Problemas en los brazos comenzaron a finales de febrero. El sistema de protección contra cortocircuitos desconectado rover durante el procesamiento de muestras de rocas, el 27 de febrero de este año en 911 misión clorhídrico. La unidad se detendrá automáticamente su trabajo y pidió más instrucciones de la Tierra. Desde entonces, el equipo del rover evitar el movimiento del dispositivo y su brazo robótico, y los ingenieros han concentrado sus esfuerzos en las pruebas de diagnóstico. El trabajo científico con el equipo en la cabeza asta y estación meteorológica.
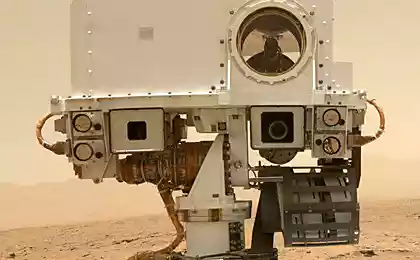
Esta semana para tratar de encontrar sin éxito: Ahora los expertos nasovskoy Jet Propulsion Laboratory de creer que la causa más probable fue un cortocircuito en el mecanismo de martillo de perforación de manipulador del rover. Herramientas en el manipulador "curiosidad" muerden en las rocas de la superficie marciana utilizando tanto la rotación de los movimientos de perforación y de percusión. Entonces aplastados muestras recogidas y analizadas en el interior del vehículo.
El cierre del 27 de febrero se produjo durante el receso de la gravilla y la transfiere en el mecanismo que mide las malas hierbas y polvo triturado. En el momento de cortocircuito trabajado mecanismo de martillo, el cepillado de bits de muestra de roca. En este Martes 05 de marzo ingenieros recibido los resultados de las pruebas: el cierre de nuevo se produjeron durante el tercer out de 180 repeticiones del movimiento. La longitud del salto fue menos de una centésima de segundo, pero fue suficiente para volver a la protección del sistema.
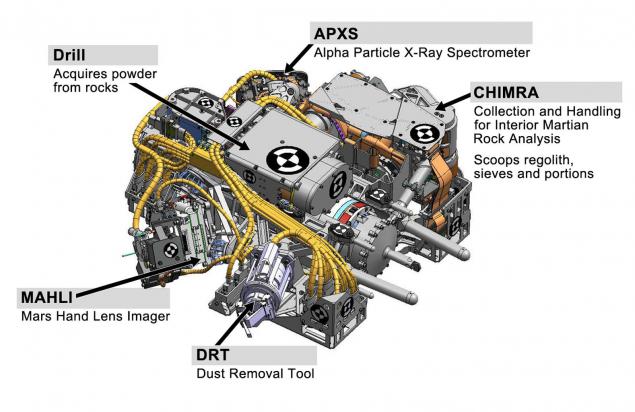
brazo robótico del rover dispositivo "Kyuriositi." NASA / JPL-Caltech em>
Las siguientes acciones serán ingenieros ensayos adicionales a los sistemas de "Kyuriositi" con otras disposiciones del manipulador, a continuación, la muestra se encuentra en el brazo robótico se transferirán al entorno de laboratorio dentro del rover para el análisis. Después de estas operaciones, el rover seguirá aumentando en la гору Sharpe . El movimiento del manipulador puede la próxima semana.
Análisis de la situación del rover aclarará cómo usar la unidad para futuras perforaciones. La bobina, que es cortocircuitado, могут desactivar , y en este caso para el trabajo futuro tendrá que elegir las muestras de rocas más blandas. Encuentre éstos en el área de estudio con facilidad, dice el jefe del proyecto "Kyuriositi" Jim Erickson. Es posible que seguirá el mecanismo de impacto para ser usado si los picos de corriente no son tan grandes. En última instancia, la funcionalidad puede sufrir "Kyuriositi" pero es mejor que una pérdida total de la unidad 2, 5 mil millones del programa espacial.
Curiosidad - el rover es la tercera generación para ser utilizado en el marco del Laboratorio de Ciencia de Marte de la NASA. El dispositivo se puso en marcha el 26 de noviembre de 2011 y se lanzó en paracaídas a la superficie del planeta rojo 06 de agosto 2012. Uno de los objetivos de la expedición es la búsqueda de posibles rastros de vida en Marte.
Fuente: geektimes.ru/post/246924/

Foto de 4 de marzo de 2015, de la posición en la que se vio obligado el rover se quedó unos días. NASA/JPL-Caltech/MSSS
Los miembros del equipo Curiosidad сообщают la posible inclusión de la unidad de brazo robótico después de un corto circuito la semana que viene. Análisis de los problemas continuará
.
Carrera "Kyuriositi" más de una semana se encuentra amenazada: Problemas en los brazos comenzaron a finales de febrero. El sistema de protección contra cortocircuitos desconectado rover durante el procesamiento de muestras de rocas, el 27 de febrero de este año en 911 misión clorhídrico. La unidad se detendrá automáticamente su trabajo y pidió más instrucciones de la Tierra. Desde entonces, el equipo del rover evitar el movimiento del dispositivo y su brazo robótico, y los ingenieros han concentrado sus esfuerzos en las pruebas de diagnóstico. El trabajo científico con el equipo en la cabeza asta y estación meteorológica.
Esta semana para tratar de encontrar sin éxito: Ahora los expertos nasovskoy Jet Propulsion Laboratory de creer que la causa más probable fue un cortocircuito en el mecanismo de martillo de perforación de manipulador del rover. Herramientas en el manipulador "curiosidad" muerden en las rocas de la superficie marciana utilizando tanto la rotación de los movimientos de perforación y de percusión. Entonces aplastados muestras recogidas y analizadas en el interior del vehículo.
El cierre del 27 de febrero se produjo durante el receso de la gravilla y la transfiere en el mecanismo que mide las malas hierbas y polvo triturado. En el momento de cortocircuito trabajado mecanismo de martillo, el cepillado de bits de muestra de roca. En este Martes 05 de marzo ingenieros recibido los resultados de las pruebas: el cierre de nuevo se produjeron durante el tercer out de 180 repeticiones del movimiento. La longitud del salto fue menos de una centésima de segundo, pero fue suficiente para volver a la protección del sistema.

brazo robótico del rover dispositivo "Kyuriositi." NASA / JPL-Caltech em>
Las siguientes acciones serán ingenieros ensayos adicionales a los sistemas de "Kyuriositi" con otras disposiciones del manipulador, a continuación, la muestra se encuentra en el brazo robótico se transferirán al entorno de laboratorio dentro del rover para el análisis. Después de estas operaciones, el rover seguirá aumentando en la гору Sharpe . El movimiento del manipulador puede la próxima semana.
Análisis de la situación del rover aclarará cómo usar la unidad para futuras perforaciones. La bobina, que es cortocircuitado, могут desactivar , y en este caso para el trabajo futuro tendrá que elegir las muestras de rocas más blandas. Encuentre éstos en el área de estudio con facilidad, dice el jefe del proyecto "Kyuriositi" Jim Erickson. Es posible que seguirá el mecanismo de impacto para ser usado si los picos de corriente no son tan grandes. En última instancia, la funcionalidad puede sufrir "Kyuriositi" pero es mejor que una pérdida total de la unidad 2, 5 mil millones del programa espacial.
Curiosidad - el rover es la tercera generación para ser utilizado en el marco del Laboratorio de Ciencia de Marte de la NASA. El dispositivo se puso en marcha el 26 de noviembre de 2011 y se lanzó en paracaídas a la superficie del planeta rojo 06 de agosto 2012. Uno de los objetivos de la expedición es la búsqueda de posibles rastros de vida en Marte.
Fuente: geektimes.ru/post/246924/
















2 Solar Impulse volará en el primer viaje alrededor del mundo en un avión sin combustible a las 6:30 am (GMT) el Lunes, 09 de marzo
150 años de la más famosa de las primeras fotos de la Luna