1082
从USB显微镜有什么可以“挤”
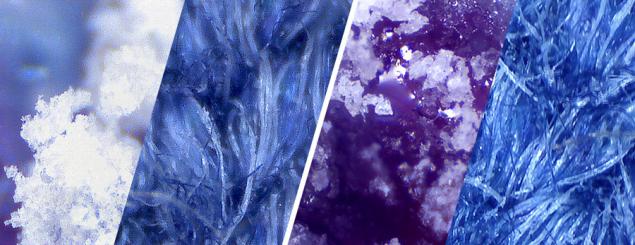
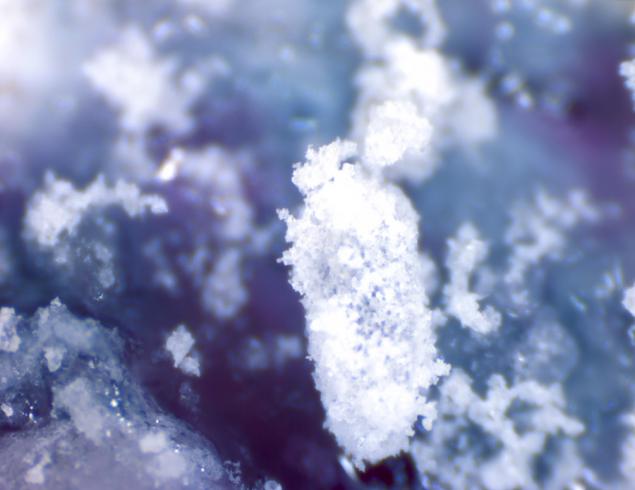
左 - 从设备“原始”的画面。右键 - 加工 I>
在本文中,我将努力达到最高的质量特写镜头一个典型的USB-显微镜。这样的设备 - 不用于艺术照片。他们的任务 - 快速,方便地查看拍摄对象的细节。不过,我会尽量捕捉特殊条件,后期处理或其他方式部分抵消这些缺点。
文章写«只是为了好玩»和本质上是一个关于寻找最好的结果的方式的故事。你不应该认为这是一个建议。如果你需要一个良好的特写镜头 - 最好用这种特殊的设备
。
USB显微镜

在文章中所有的微距拍摄制作使用的是USB显微镜,通过Dadzhet提供的(为他们谢谢!)。
该设备本身是非常典型的此类的显微镜装置。网络摄像头安装在配有一组8个LED立场,照亮主体和两个旋转转盘调节对焦和光照的程度。
在显微镜被安装在桌子上,开灯,透镜放置在调查对象下。然后,你必须设置焦点,并使用所提供的 - 拍摄照片或录制视频。照片被保存为JPG,视频格式AVI(未压缩)。
由于这个装置的文章已经发表在 geektimes.ru (我建议在文章读了很多很酷的图片和比较)我将不再重复以上描述的设备和它的功能性。
对于这篇文章的目的,它足以知道里面是什么设备是一个网络摄像头,可选模块灯并调节对焦。允许实时观看计算机图像上的20-200倍的放大倍数,并具有象素的1600 * 1280的矩阵的分辨率。
规格其余不是至关重要的,但我不得不说一下它的几句话,在文章的末尾。
0部分:快照
所以,第一步是要获得的图像进行处理。您可以使用标准应用«MicroCapture»包中包含。或任何其他允许您使用网络摄像头捕捉图像。

作为一个测试图像我用一块布,它清晰可见各类文物。
所有在文章的框架,我会保存为1600 * 1280像素的分辨率,因为它是“原生”分辨率的相机。使用不同的分辨率没有任何意义,如果我们想获得最高质量的照片,插值算法会破坏信息,使之难以与噪声工作。
让我们来看看在100%的比例图像。
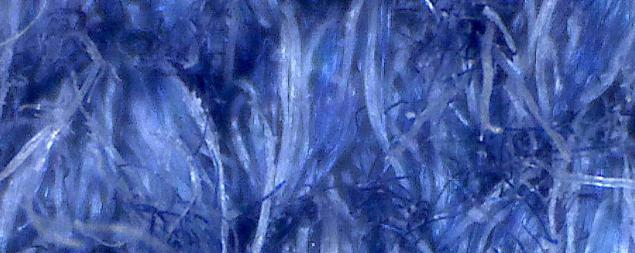
可以看出,画面大量的噪音。让我们开始。
第一部分。动态噪声
我怎样才能去除照片中的噪音?
小题外话人们远离图片 B>整个画面基本上是基于三个主要参数之间的关系:灵敏度矩阵 I>(ISO = 100,200,400,等... 。),的快门 i>的(设置了光击中矩阵的时间)和光圈 i>的(“窗口”的大小,通过该光入射到阵列上)。这三个数字确定有多少照射到基体,并与该指示灯的准确度将是“数字化»。
噪声发生由于缺乏灵敏度矩阵。你能想象(虽然这并不完全正确),灵敏度,这很简单,就是把从矩阵中的所有数据来自系数。显然,较小的光传来的封闭孔或简短摘录后面的阵列上 - 就越需要乘以以保持图像的可接受的最终亮度,并且更多的工作将是可见的误差矩阵数据矩阵的数目 - 即噪音。
降低噪音 - 你需要降低ISO(感光度),并为此目的 - 或多个开孔或提高快门速度。
但在这里我们遇到和技术的限制 - 在这个网络摄像头,最喜欢的人 - 灵敏度矩阵不会改变。光圈 - 无管制和快门速度 - 只需调节光量。而且它改变了程序调整到光的水平。
可以增强外部照明 - 但必须减少曝光。您可以减少背光 - 再提高快门速度。在任何情况下,光的实际数量将等于基质并且因此噪声将始终是相同的(在黑暗中和足够轻的相机信号被简单地乘以增益,这导致更多的噪音)。
所以。我们不能提高快门速度是指相机,那么剩下要做的就是绕过它。例如,你可以节省几枪,然后把它们粘合成一体,发现算术平均值为每个像素。更重要的是,从数百张照片录像...尝试:
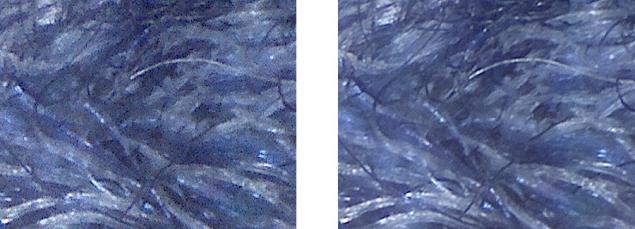
形象是肯定更好,几乎消失了的“小”的噪音。但质量仍然较差,分别亮点(其中3图中黄色条纹的高亮显示)。
该产生的噪声从色彩矩阵考虑了“正确”的随机偏差的事实。但价格便宜矩阵是放在网络摄像头 - 这是“正确”的值可能是一个错误。换言之,偏差的期望不趋于零。
这是很容易的,如果“胶水”平面图像看,例如,完全散焦图像,以便不干扰不必要的细节。
的
<一href="http://habrastorage.org/files/e16/010/3db/e160103db6e94323a6e74110244b7b3e.jpg">Один框架。点击 - 原 I>
的

<一href="http://habrastorage.org/files/ae5/d0a/dbe/ae5d0adbeaae4edab6e15c9bd6fd501a.jpg">Среднее 200帧。亮度增加了2倍,为清楚起见 I>
正如你可以看到非常显著的噪音。一些像素一般都是碎,其他形式的乐队和变色的区域。如果远程噪音可以被称为动态的,这一点 - 永久性或静态的。尝试删除他。
静态噪声
我首先想到的 - 你可以使用所产生的图像上方的校正框。从图像的平均色只要减去和加上灰色和增加对比度中的2倍。其结果是,我们得到的图像,其中把它放在任何框架 - 我们种将减少干扰
。
类似的原理被用在后处理中的一些细胞,但在一般的 - 是一个错误的决定。有缺陷的像素 - 是缺乏信息,而且我们并没有对他们处以 - 不带信息无章可循。
部分有效像素 - 原因充其量,减少颜色的动态范围,并且在最坏的情况 - 全色失真。
另一种解决方法 - “传播”几个像素的最终图象中的每个象素矩阵的影响。这可以实现,如果取代一个小范围内的主题,然后“胶水”给出位移图像。使每个点的对象已在合成图像中的一个像素被表示。
移动一块组织手里我得到了一张图片:

粘上这些图片 - 你首先需要“稳定”的形象,以达到完全不动。这可以通过分析运动,例如,使用的OpenCV来完成,但我去一个更简单的方法 - 通过运行第三方跟踪程序
跟踪AE后,与“粘合”我的框架工具 - 得到这样的结果。

注意的是,没有噪音,但有造成的事实,即图像偏移和模糊颤抖令人不快的模糊。
尝试确定模糊排除粘结油帧的程度。要做到这一点,我去了最简单的方法 - 计算图像的所有相邻像素之间的差异的总和。越模糊图像 - 的相邻像素越近的颜色,并且绝对差值的这样的总和 - 给模糊帧的一些估计。在测试设定的时间表模糊看起来是这样的:
清晰可见的区域在哪里下滑的图像,它抹黑(在这些地方几帧下山的时间表)。切断模糊的图像可以好一点的画面,但显著的变化不会太剧烈波动。我想进一步提高的结果,于是继续说。
自动化
先决条件作进一步的是,我正好是一个步进电机28BYJ-48的事实。最好让它移动的物体在显微镜的前面。对于面团就足以使一个简单的旋转桌面。
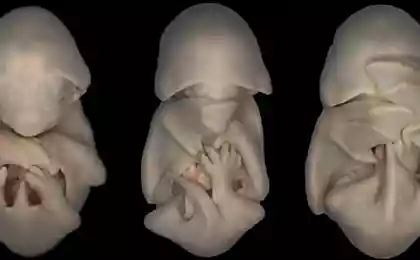
优势在无润滑和插科打诨抖动传出对焦等当然,最好直接固定在电机显微镜,其中有打印附件,包括三个部分:
的

但是,即使在这样的情况下,跟踪是不完美的。如果增加成为显著卷帘和透视畸变,从而导致不能得到解决跟踪图像的失真(必须切换到跟踪摸查,但是这一切都没有解决的问题)。问题的一部分时相比顺序地从第一拉平到所有帧,并且当有显著偏差 - 只是不考虑帧
。
对于一个典型的序列图看上去异常:
由此可以看出,因为随时间的变化累积每一帧与第一比较。还值得注意浪涌,这些点对应于跟踪误差。
这项工作是图像:
面料 B> 的

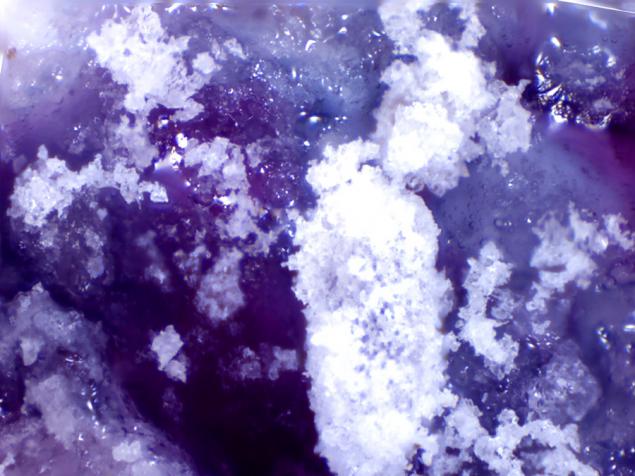
糖和果酱下降 B> 的
令人失望的浅景深,但它是可以解决的。尽管有保留,而从多个图像具有不同焦点粘在一起,一个与更大的景深是可能的。
结果:
的

的
所有图片可点击 I>
这里是在一个普通的对象(金耳环)工作的一个例子。
移除的唯一的背景噪声+2缝合具有不同焦深,的«粗»帧图像。

处理。

结论的
在实验中,我们使用<一href="http://dadget.ru/katalog/sdelay-sam/usb-microscope/?utm_source=geektimes.ru&utm_medium=referral&utm_campaign=usb-microscope">«Цифроскоп»由Dadzhet提供。
来源: geektimes.ru/company/dadget/blog/249662/



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}