149
2015-07-04
Бютжетный гексакоптер.
Собрать нечто подобное я хотел уже давно, но как обычно не хватало времени, денег, или еще какая ерунда случалась. Но тут наконец вот он долгожданный недельный миниотпуск. Да и еще посылка с китая приехала, а внутри …
Будет 10 фото.
Рама шестиконечная может нести на себе шесть двигателей с регуляторами оборотов, три двигателя вращаются в одну сторону, три в другую.
1.

2. Но для начала к двигателям прикручиваем пропадаптеры – держатели пропеллеров.
И обязательно на синий фиксатор резьбы, иначе от вибрации все быстро открутится обратно.

3. Раму снова разбираем и прикручиваем к лучам двигатели и регуляторы оборотов (ESC).

4. Припаиваем регуляторы к плате разводки питания, в данной раме она встроена в саму раму.

5. Допаиваем остальное, а также силовые провода к батарее. Последние должны быть довольно толстые, так как по ним на полном газу по расчетам может идти ток до 70 ампер.

6. Прикручиваем лучи болтами с фиксатором резьбы, устанавливаем блок питания электроники (UBEC), пищалку сигнализатор разряда батареи, изолируем пайку термопистолетом на всякий случай. Думаем куда крепить батарею…

7. Устанавливаем верхнюю часть рамы, и лепим на нее всю остальную электронику.
Приемник, Bluetooth модуль для связи с телефоном\компьютером, GPS, а также “мозг” всего этого равлега AIO flight controller. Последний клеится на специальную демпфирующую прокладку, что бы мелкие вибрации от двигателей меньше воздействовали на гироскоп и акселерометр.
GPS в целях экономии пока используется не специализированный, а такой модуль который использовался в то время когда в смартфонах не было встроенного GPS, holux – m1000. После некоторого шаманства стал отдавать координаты с частотой 5 герц. Что меня пока устаивает.

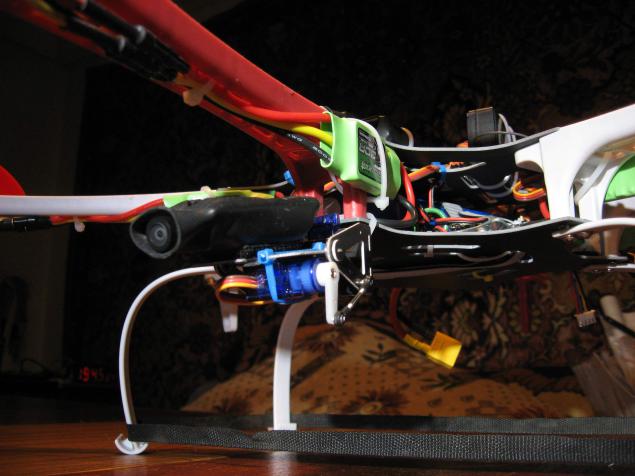
8. Лепим пока на стяжках :) подвес для мини видеокамеры. А также ножки, они оказались немного магкие для веса аппарата… но ничего, ситуацию исправил черный шнурок :)
Источник: www.yaplakal.com/
Будет 10 фото.
Рама шестиконечная может нести на себе шесть двигателей с регуляторами оборотов, три двигателя вращаются в одну сторону, три в другую.
1.

2. Но для начала к двигателям прикручиваем пропадаптеры – держатели пропеллеров.
И обязательно на синий фиксатор резьбы, иначе от вибрации все быстро открутится обратно.

3. Раму снова разбираем и прикручиваем к лучам двигатели и регуляторы оборотов (ESC).

4. Припаиваем регуляторы к плате разводки питания, в данной раме она встроена в саму раму.

5. Допаиваем остальное, а также силовые провода к батарее. Последние должны быть довольно толстые, так как по ним на полном газу по расчетам может идти ток до 70 ампер.

6. Прикручиваем лучи болтами с фиксатором резьбы, устанавливаем блок питания электроники (UBEC), пищалку сигнализатор разряда батареи, изолируем пайку термопистолетом на всякий случай. Думаем куда крепить батарею…

7. Устанавливаем верхнюю часть рамы, и лепим на нее всю остальную электронику.
Приемник, Bluetooth модуль для связи с телефоном\компьютером, GPS, а также “мозг” всего этого равлега AIO flight controller. Последний клеится на специальную демпфирующую прокладку, что бы мелкие вибрации от двигателей меньше воздействовали на гироскоп и акселерометр.
GPS в целях экономии пока используется не специализированный, а такой модуль который использовался в то время когда в смартфонах не было встроенного GPS, holux – m1000. После некоторого шаманства стал отдавать координаты с частотой 5 герц. Что меня пока устаивает.

8. Лепим пока на стяжках :) подвес для мини видеокамеры. А также ножки, они оказались немного магкие для веса аппарата… но ничего, ситуацию исправил черный шнурок :)

Источник: www.yaplakal.com/