Google ha publicado un informe en mayo sobre las pruebas robomobiley
 Bashny.Net
Bashny.Net
El sitio web Google Self-Driving Car proyecto había un pequeño PDF- отчёт el equipo de ingenieros participan en el proyecto de los vehículos robóticos. Al parecer, estos documentos serán publicados mensualmente. A pesar de que el informe actual contiene sólo unas pocas páginas, se describe en detalle el incidente del camino en el que en los últimos seis años desde el inicio de la prueba tuvo que conseguir robomobili gigante de las búsquedas.
En primer lugar, Google refina cifras: la participación en el programa de 23 coches de Lexus RX450h SUV, que se mueven en las carreteras de California, principalmente en Mountain View. Además de ellos en vertederos cerrados son 9 prototipos más. Desde 2009, nos las arreglamos para conducir robomobili 1.627.591 kilometros en modo robótico (bajo se entiende que la gestión sólo proporciona software y situado en el interior del conductor del coche no toque el volante). En una semana promedio robokara llevó 16 000 kilometros en la carretera abierta.
En seis años, hubo 12 accidentes con robomobiley, todos los cuales eran la culpa de la gente. El más cercano en el tiempo con el accidente de mayo se produjo Lexus, cuando se detuvo en una luz roja en la intersección de Mountain View. En este momento, algunos coches hombre impulsado arrugó parachoques trasero Lexus y dañó de manera sensores en él. La velocidad del culpable esta vez fue sólo 1,5 km / h, por lo que un accidente terminó sin lesiones graves.
Es interesante evaluar las situaciones complejas de tráfico que se ajuste el AGV, y cómo se las arregló para salir de ellos:
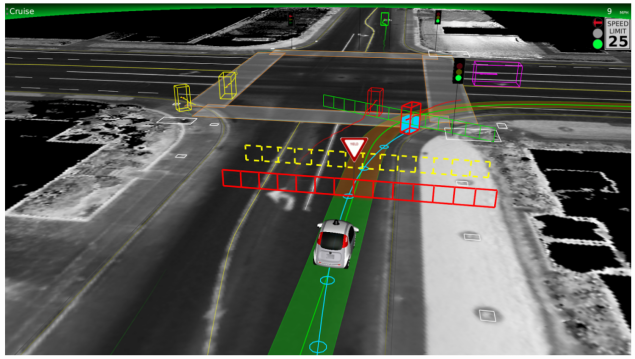
El gráfico anterior muestra el AGV plan de movimiento en una encrucijada y dos motociclistas que están marcados con paralelepípedos rojos (línea roja roto - es la forma de su movimiento). AGV se detuvo en la intersección, momento en que la izquierda hacia él motociclista relativamente superado con éxito la intersección y echaron sobre. Pero la motocicleta, volviéndose hacia el AGV derecha, por alguna razón desconocida la izquierda para que se aproxima de modo que él estaba directamente en el camino de la guglomobilya - que muestra la trayectoria calculada de la línea azul. El auto de software decidió quedarse y no ir hacia adelante, lo que permite la motocicleta para evitar una colisión derecha en el cruce. Como resultado, AGV motocicleta de forma segura y se perdió, evitando problemas en el accidente. Una dificultad adicional es el hecho de que todo lo que ocurrió en la noche, y el conductor, un hombre sería difícil dar una evaluación correcta de la situación.
Fuente: geektimes.ru/post/251638/
En primer lugar, Google refina cifras: la participación en el programa de 23 coches de Lexus RX450h SUV, que se mueven en las carreteras de California, principalmente en Mountain View. Además de ellos en vertederos cerrados son 9 prototipos más. Desde 2009, nos las arreglamos para conducir robomobili 1.627.591 kilometros en modo robótico (bajo se entiende que la gestión sólo proporciona software y situado en el interior del conductor del coche no toque el volante). En una semana promedio robokara llevó 16 000 kilometros en la carretera abierta.
En seis años, hubo 12 accidentes con robomobiley, todos los cuales eran la culpa de la gente. El más cercano en el tiempo con el accidente de mayo se produjo Lexus, cuando se detuvo en una luz roja en la intersección de Mountain View. En este momento, algunos coches hombre impulsado arrugó parachoques trasero Lexus y dañó de manera sensores en él. La velocidad del culpable esta vez fue sólo 1,5 km / h, por lo que un accidente terminó sin lesiones graves.
Es interesante evaluar las situaciones complejas de tráfico que se ajuste el AGV, y cómo se las arregló para salir de ellos:

El gráfico anterior muestra el AGV plan de movimiento en una encrucijada y dos motociclistas que están marcados con paralelepípedos rojos (línea roja roto - es la forma de su movimiento). AGV se detuvo en la intersección, momento en que la izquierda hacia él motociclista relativamente superado con éxito la intersección y echaron sobre. Pero la motocicleta, volviéndose hacia el AGV derecha, por alguna razón desconocida la izquierda para que se aproxima de modo que él estaba directamente en el camino de la guglomobilya - que muestra la trayectoria calculada de la línea azul. El auto de software decidió quedarse y no ir hacia adelante, lo que permite la motocicleta para evitar una colisión derecha en el cruce. Como resultado, AGV motocicleta de forma segura y se perdió, evitando problemas en el accidente. Una dificultad adicional es el hecho de que todo lo que ocurrió en la noche, y el conductor, un hombre sería difícil dar una evaluación correcta de la situación.
Fuente: geektimes.ru/post/251638/
Tags
Vea también
Google creará una red global para acceder a Internet a través de globos
Como me metí en Google [traducción]
Google Glass sigue vivo
Google Glass se reiniciará
Proyecto Loon de Google está listo para lanzar globos
Uber en contra de Google: la batalla en el sector de los aviones no tripulados de coches
Google utiliza la máquina de aprendizaje para mejorar la eficiencia de los centros de datos
Google devolverá el volante y los pedales de sus vehículos robóticos
El proyecto sobre la "lucha a muerte" en Google recibe un centro de investigación en el costo de 1, 5 mil millones de dólares
Google ha creado un museo virtual de la historia y el arte chino