实验“实验室”或者,正如我们已经创建了一个机器人智能手机青睐
 Bashny.Net
Bashny.Net
著名的谚语重拍说,这是更好地看到一次比读一百遍。我们谈了很多关于新的功能和优势,让第二个屏幕YotaPhone。但最用户友好的介绍不能与能力,看看它是比较 - 与智能手机的第二个屏幕工作
我们决定创建一个机器人,这将有助于证明这个想法。而且不只是一个机器人和训练有素的管理YotaPhone。我们从审视传媒伟大的球员创造了它。
«实验室» H4>
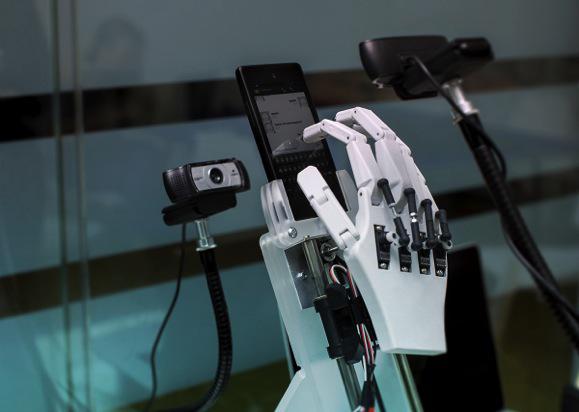
这个项目我们叫«实验室»。其实质是让每个人都能够远程测试某些功能YotaPhone使用专门为这种机器人创建的。非常真实,有血有肉,塑料和舵机。而且由于两个摄像头可以观察正在发生的事情在两个屏幕上YotaPhone。
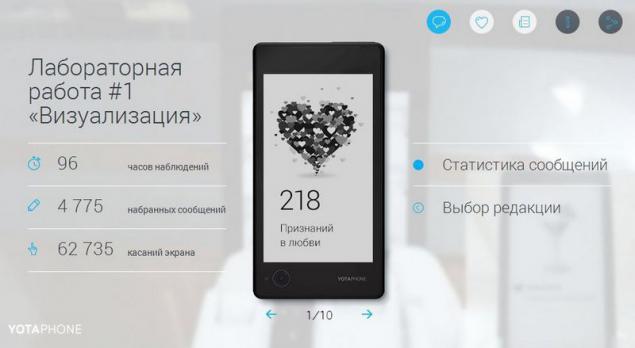
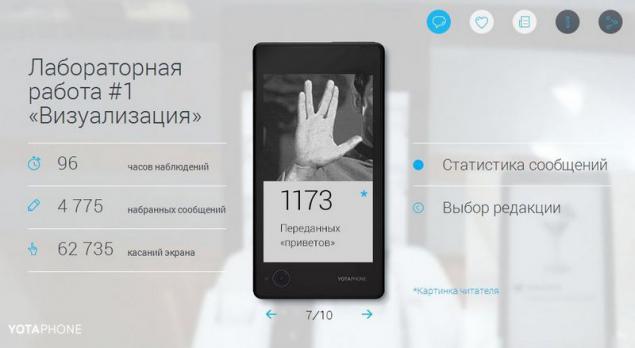
简单地说,控制机器人的过程是:通过网站,您可以发送短信和号码,然后观察一下机器人收集并把它发送给你。如果文本中包括的特定词语标记,然后在第二屏幕上有对于这个字创建一个图像。
在机器人作为发件人的短信的操作,我们的用户发送的这4775个职位,其中218人的爱情宣言。顺便说一句,这也是65黑客攻击。
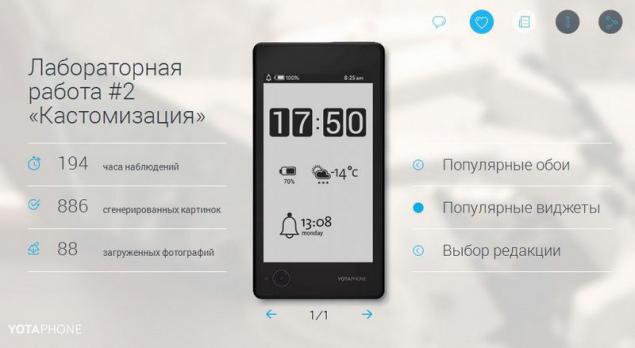
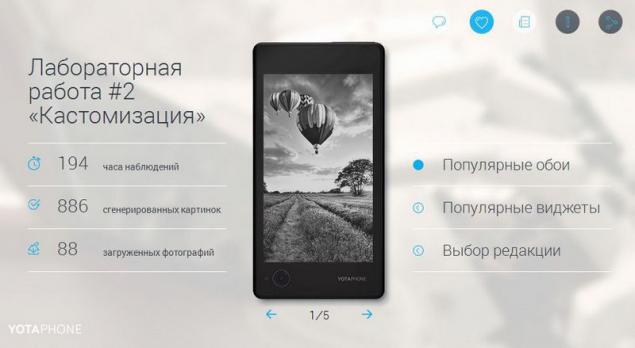
接着举行测试的第二阶段,我们有机会能够远程下载你属于机器人YotaPhone第二个屏幕上的墙纸,也选择不同的部件。机器人上的主屏壁纸和一组小部件“收集”,然后示意品牌put2back有效地将其发送到第二个屏幕。在此阶段,用户所产生的,并上载886的照片88的照片。
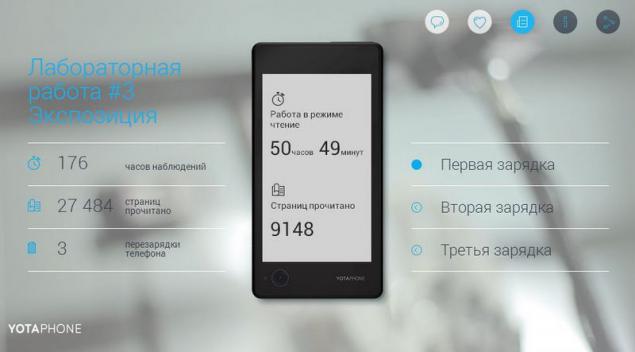
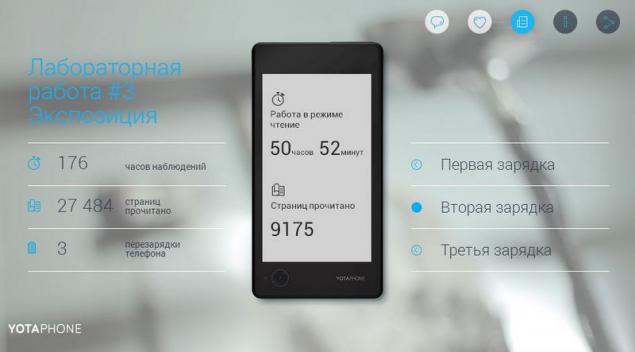
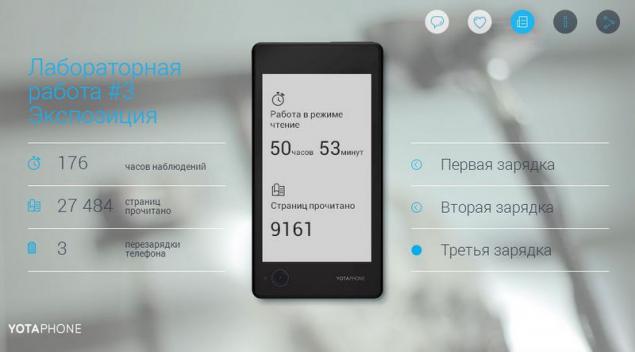
最近完成的远程测试YotaPhone来者不拒由机器人的第三阶段。这一次,我们有一个压力测试:多长时间会持续YotaPhone从单一的电池充电而第二个屏幕上看书。在一个文学源的作用,担任“战争与和平”,以及“阅读”的速度是每分钟3页。特别是对于第三阶段,我们围绕承载灯的第二个屏幕YotaPhone箍。它被连接到可选的Arduino。任何人都不能只是夜以继日地观察读“战争与和平”的过程中,也改变光照强度,模拟的情况在一天中的不同时间。
在此阶段,有三个试验中,该被充电的智能手机三次制作完全放电。这里是第三阶段的结果如下:







历史 H4>
首先,我们决定采取阻力最小的路径,并探讨在开放获取现成的项目,如机械手臂,甚至包括 的开源项目等提供。该项目的主要缺点是基于拉紧电缆机械化的手指。不幸的是,它不会达到所需的定位精度。同时,我们也很喜欢这个项目,但他并没有满足的关键条件 - 可用性手中 - 所以从中也被抛弃了。这样一来,就决定建立自己的设计的机器人。
原型 B>
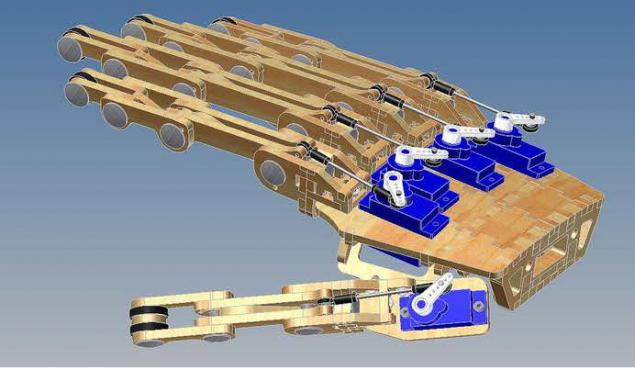
首先,我们决定把环氧树脂的草案。模制零件用刀子,得到所希望的形状,然后再涂上白色。首先,我们想测试的设计的功能性,来估计位置和附着伺服电动机的方法,以评估手指的运动范围。

管理所有伺服器决定使用的Arduino UNO。测试样机的第一个版本后,来到了以下结论:
•要提高定位的精度是必要的,以与趾骨取出伺服
•每个手指应该只由一个伺服
被控制
•对于扫掠姿态是必要的,以保证向上/向下
整个臂的移动
工作示例 B>
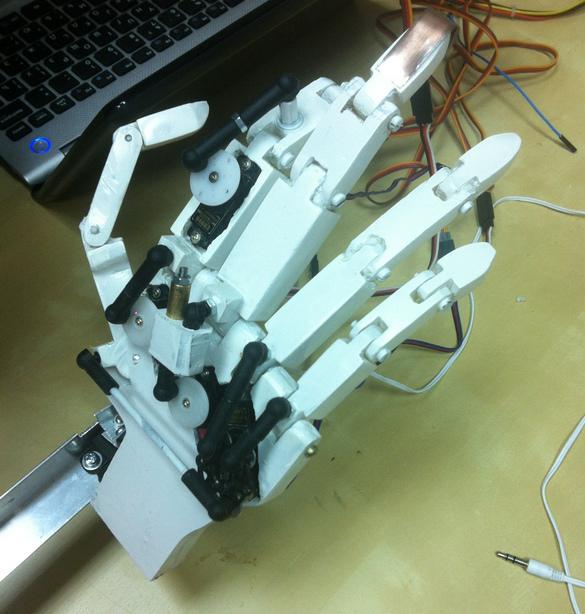
SolidWorks中的CAD包,我们创建3D模型15份,其中所述的手。上打印三维打印机,并在组装后进行了与触摸屏的交互检验。
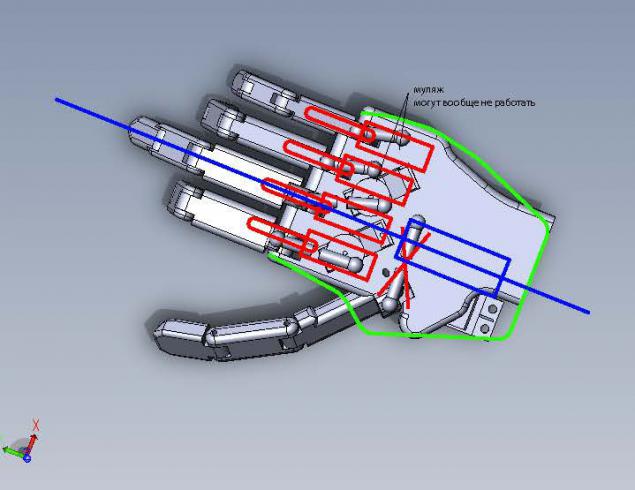
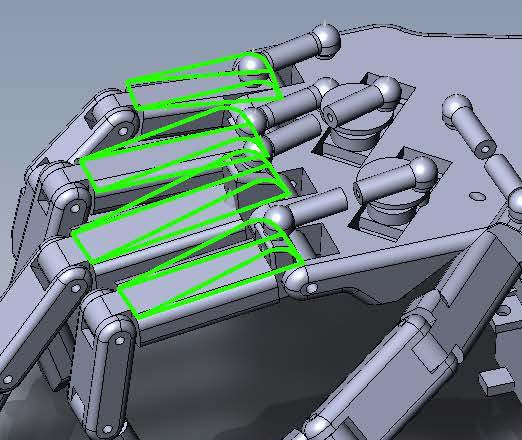
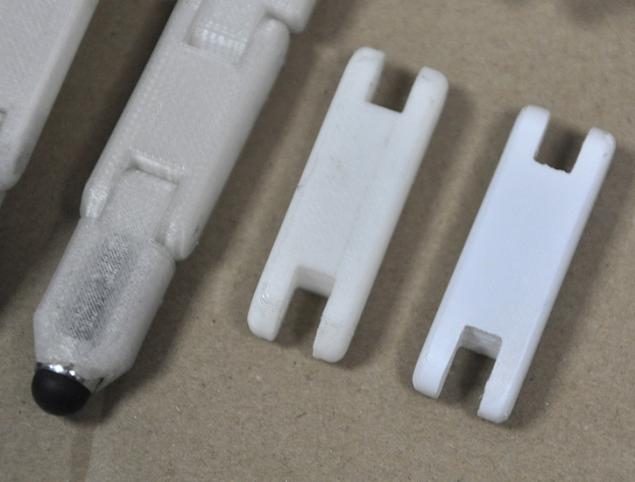
原来,电容屏并没有从中臂由塑料回应。该问题已通过将手指解决切断尖触针直径大。
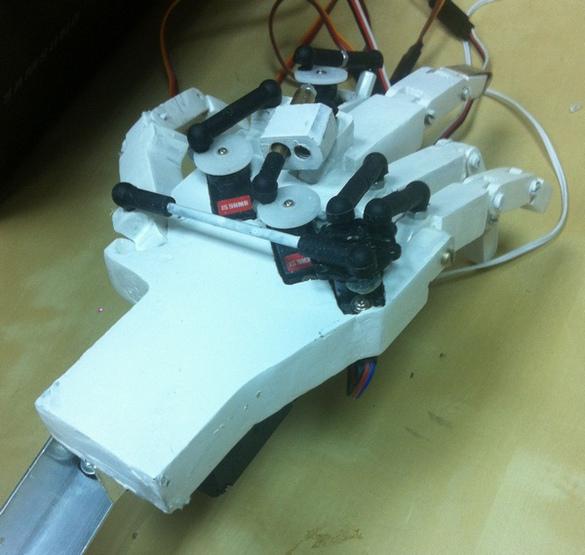
设置一个旋转臂马达以及控制手指舵机。其精确度是不够的抓住了智能手机的屏幕上的虚拟按键可靠的定位手指。其结果,有必要使用昂贵的伺服装置,产生用于模型飞机:FUTABA S1353手指和BLS-352以旋转的手。除了定位准确性,我们决定的可靠性问题,因为手应已连续工作了三个星期。
解决后这个问题开始解决一个新的。手本身安装在步进电机,其安装在所述可动上/下平台的轴。发动机的作用是接通的臂围绕一轴线垂直于智能手机的平面。并且在转弯时的振动严重,因为该结构的整体刚度是不可能的,以补偿存在的惯性显著时刻。这又导致了手指的定位精度的降低。为了减少震动,我们尝试了不同的衔接垫片,但它是无效的。我必须人为地降低旋转发动机的速度,并进入一个小的停顿之后每转并驾齐驱熄灭残余振动。
与转子发动机意想不到的问题有关。他很温暖。这是决定组装中间控制器空闲期间完全关闭发动机。
到改善的打火机塑料机器人印刷第二工作样品的外观。前涂在白色的组件,进一步的细节赋予产品更优雅的外观。

前 B>
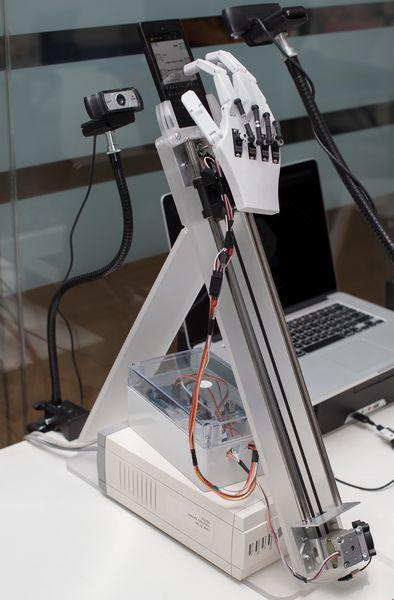
智能手机与该机器人具有工作,就决定把倾斜的,因为它通常会保留一个人,而不是垂直或水平。在此基础上机架已被设计为矩形三角形的斜边,其中包括其上的平台上移动的手两个轨道的形式存在。
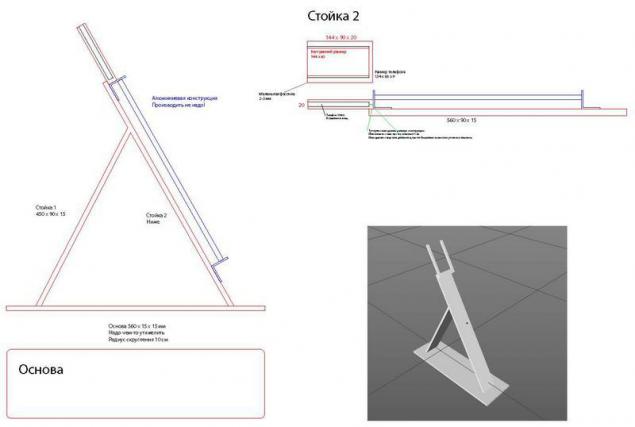
机架由白色塑料制成。该平台被连接至手带驱动步进电机,通过该平台是沿导轨移动。

软件部分 B>
除去所有的电气 - 机械屏障后,我们提出以调试项目的软件部分。作为客户端,我们用JavaScript编写的一个小型Web应用程序。从客户端的信息获取到正在运行的Ruby 2.0.0的Rails 4的MySQL我们的服务器。服务器收集用户的请求并生成用于所述机器人的所有任务。这些信息,服务器发送的NodeJS写了我们一个本地管理的应用程序。所有数据在格式的JSON发送。进一步的目标是转化为Arduino的,它直接连接到所述机器人的具体说明。与执行的Arduino库互动的 voodootikigod /节点一个串口 I>。
此外,管理应用程序接收来自直接在智能手机上运行的专门编写客户端的反馈。该客户端可以跟踪点击的坐标,并且如果检测到不一致时,该控制应用程序执行dokalibrovku。
委托管理应用第三个功能,是记录电影,它描述了每个任务的执行。要使用摄像机罗技C920 ,供奉在gibkih持有人。在项目管理应用程序的第一阶段的通过接收来自客户机模块上的上发送SMS智能信息。视觉效果与使用WireCast相机记录,它是从相应的视频剪辑进一步切割,并将其链接发送给用户。
为了节省时间,我们决定创建自己的API,用于大规模视频直播,而是用从公司CDNvideo现成的解决方案。然而,由于这样的事实,他们的API尚未尚未抛光一段时间,我们有问题以保存电影。最终,开发商已经给我们提供了API的一个新的,全面的工作版本。
总体而言,我们已经取得了两个机器人谁是直接参与公开测试YotaPhone。最后的样品稍有现代化:有必要改变附着在旋转电机的臂的位置时,机器人可以作出手势滚动屏幕(滑动层)
。
结论 B>
这个项目对我们来说是一个迷人的职业。能够创造性地解决了不规范的问题,创造一个新的,非常普遍的设备,看如何机器人“住”了他的生命感谢用户的利益, - 这一切都是非常接近的精神,我们对YotaPhone工作
。
我们想给大家一个机会,亲自尝试它是什么 - 有两个屏幕的智能手机。感觉手机拿在手里,评估电子墨水屏幕的响应。不幸的是,这是不可能的。但我们有信心,即使遥远,但随着智能手机的独立的互动可以更好地理解的第二个屏幕的好处。我们相信,这样的交互测试的可能性YotaPhone更诚实比舔广告。你有什么感想?我们非常想知道你对这个项目的看法。
资料来源:<一href="http://habrahabr.ru/company/yotadevices/blog/223543/">habrahabr.ru/company/yotadevices/blog/223543/












标签
另请参见
在我们的机器人:如何创建在家里的智能助手
在追求你爱的东西或我是在比利时
升级主屏幕或Apple关注可能影响的iOS
是偶然发生的10惊人的科学实验
如何赢得一个梦想要不了多久otsustvie睡眠影响的心灵?
销售,或者如何自杀几个秘密出售积雪的富士山。
科学家们已经创造了增加世界的错觉
当我们收集的飞行机器人
未来是在这里吃还是我们如何看待的进展:对于悲观后的5周年