第一个机器人,将收集的草莓
 Bashny.Net
Bashny.Net
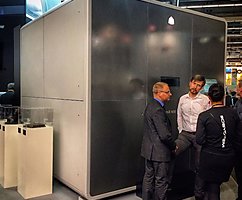
过程自动化装配的草莓原来的工程师的日本公司Shibuya EC。 他们已经开发出一个机器人可以检测成熟的浆果,并切断他们在托盘。

机器人的身高约两米,并移轨道之间起床草莓和建立一个水平的成熟。 如果浆果可以被消耗,机械臂,机器人打破它在垃圾桶。

速度大约八秒每浆果。 该进程确定的成熟程度和定位的操纵对应于三个数码相机:两个预置和第三个准确的捕获和方向的机械臂。
资料来源:/用户/413

机器人的身高约两米,并移轨道之间起床草莓和建立一个水平的成熟。 如果浆果可以被消耗,机械臂,机器人打破它在垃圾桶。

速度大约八秒每浆果。 该进程确定的成熟程度和定位的操纵对应于三个数码相机:两个预置和第三个准确的捕获和方向的机械臂。
资料来源:/用户/413
标签
另请参见
脑控机器人外骨骼
情况可能导致的人工智能的发展
食品,可以杀死
8的基本技能,第一个援助而应采取的的每一个
美国航天局发明了一个新的"机器人超级英雄"
机器人体操运动员表明nedyuzhy的能力
101组合在键盘上,它可以使您的生活更轻松
新办公室的笑话,可以把你的同事到精神崩溃
5所谓的天才能力,可以教人
一种物质,可以停止艾滋病、埃博拉出血热、鼠疫、和严重急性呼吸道综合征,是保持隐藏在公众