创建另一个机器人的历史。第二部分,«这是活着!»
 Bashny.Net
Bashny.Net
延续了一系列关于创建一个简单的轮式机器人单片机ATmega16A。
在第二 I>我的职务,我将介绍如何创建并建立自己的机器人。让我们先从印刷电路板和完成作为第一步骤制造(正确地说 - 滚轮)我们的设备。也可以给节目在PC第一次体验到Qt的,即建立通过蓝牙机器人程序管理和数据交换。
如果你愿意,你可以阅读首次公布并了解这一切是如何开始,好了,每个人都要求猫。
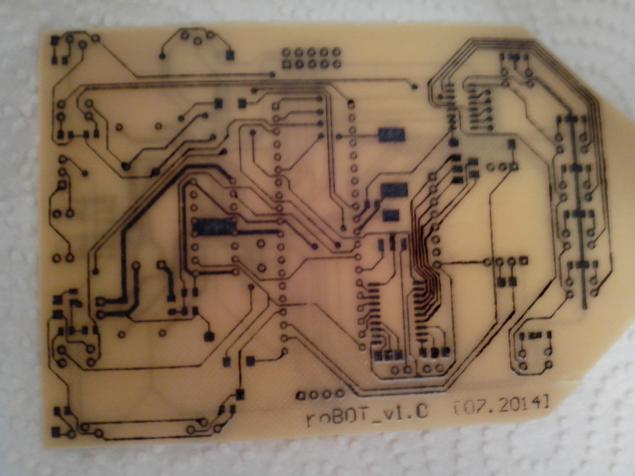
最后一部分结束了,在前面我们穿了一件成品PCB布局,那么它的时间来创造和传递的电子版真实有形的世界我们的想法,是不是在每一个无线电爱好者,工程师,发明家的心燃烧的欲望?!在我的怀里了仅有1mm的PCB,所以我没有想到开始转移到绘图板轨道标准战利品的过程。
我的照片的质量表示歉意,但我有一个便宜的电话......
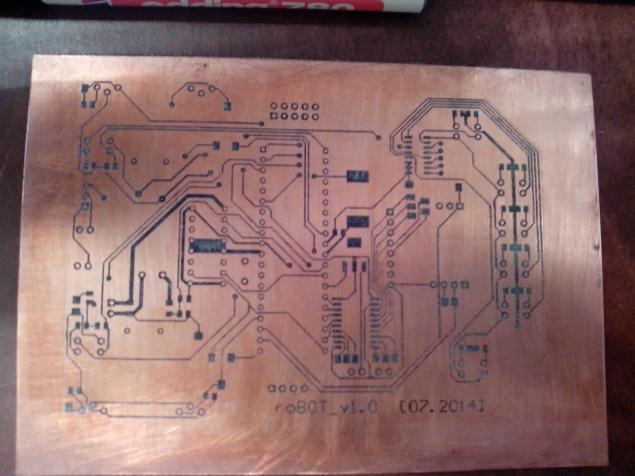
下一步骤是蚀刻!尝试使用过氧化氢和柠檬酸,当然安全和非常便宜的方法蚀刻的一种新的方式,但似乎过于敏感的组分的比例。后神奇操纵容器的溶液处理的一个小时开始与体面功率(应该说,这是可以改变图案板,然后,将所有的腐蚀快得多)。
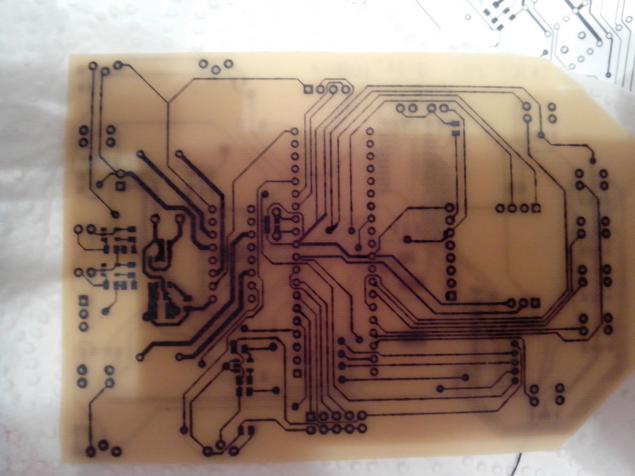
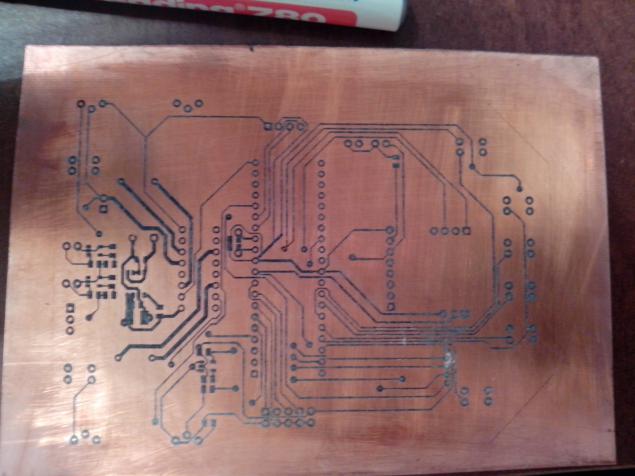
主板上的磁迹的80-90%,以获得良好的,但由于基本轨道是0.2毫米,抓媒染剂,我与焊料和细线去掉,因为他们做了同样的孔。在一般情况下,整个过程花了下午3点的焊接。
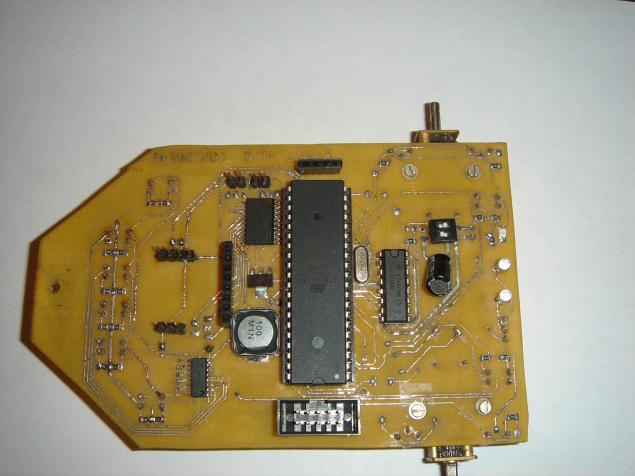
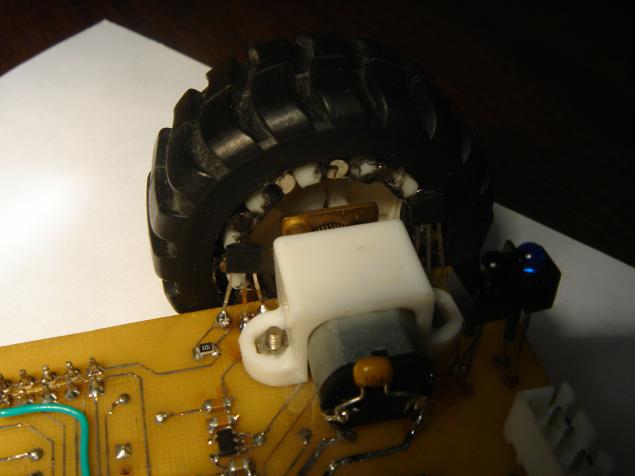
发动机必须转移到板的底部,因为我意识到我需要董事会和你想去的表面之间的最大差距,但仍机器人转向低矮。
一旦我们想起了电机,召回和编码器的想法,因为我是下令直径字面上毫米比轮槽较小的楼体,他们不得不以某种方式解决这个问题,我们也知道这个概念很简单 - 我刚捡起来驱使他们回到海湾在胶枪的同时,是不是很美观,但很快又实用。最主要的是不要使其反转,这将是到侧板,她那么小 - 12磁体在轮子,那就是, 6激活反过来,并用直径43毫米车轮得到遍历在单个操作中对22毫米轮路径。

董事会,反过来,用小间距的调整把霍尔传感器将了解什么方向移动。
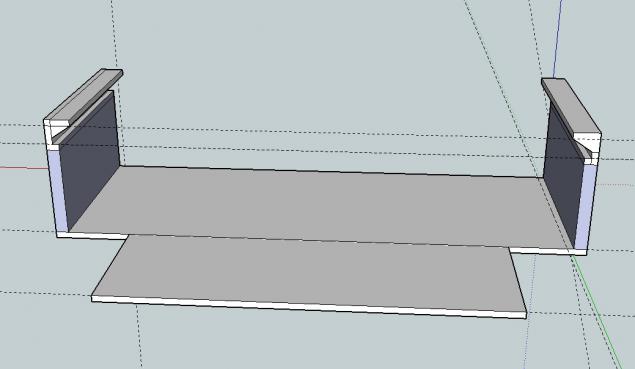
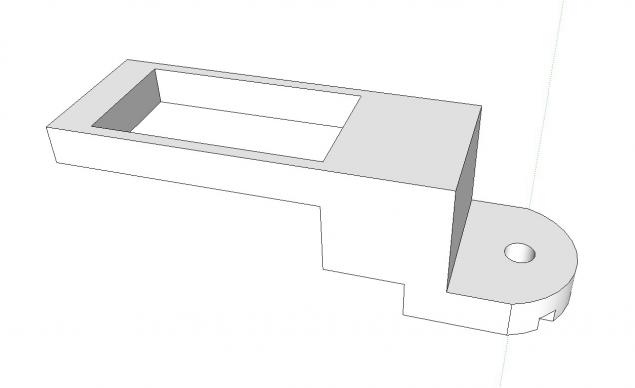
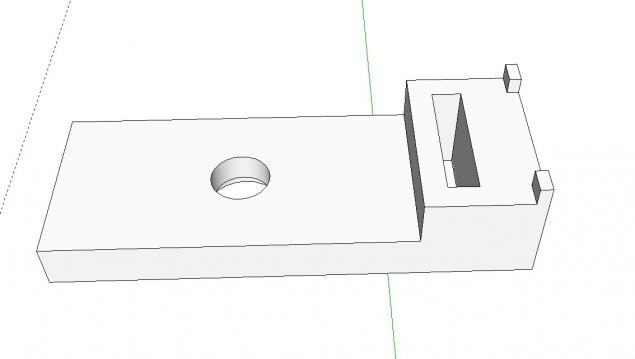
用于固定电池,伺服系统和超声波测距仪已经印上了3D打印机就是一些细节。
电池盒。
持有人的农奴。
超声波测距仪的持有人。
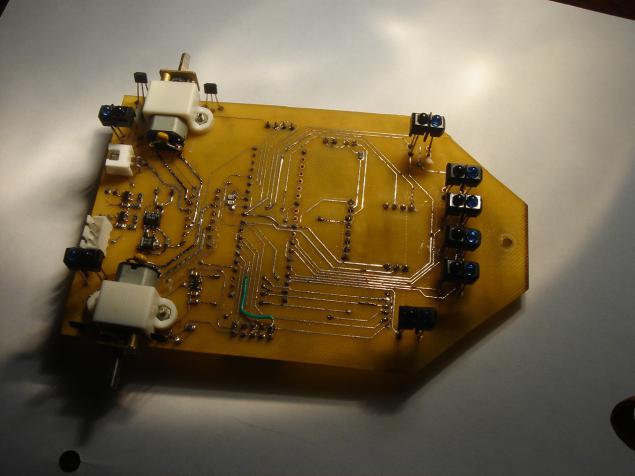
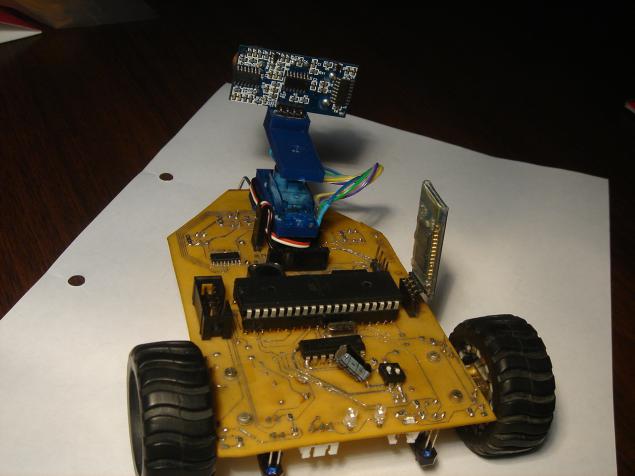
一点点微调的细节文件,一切都陷入的地方,到底变成了这样的机器人。
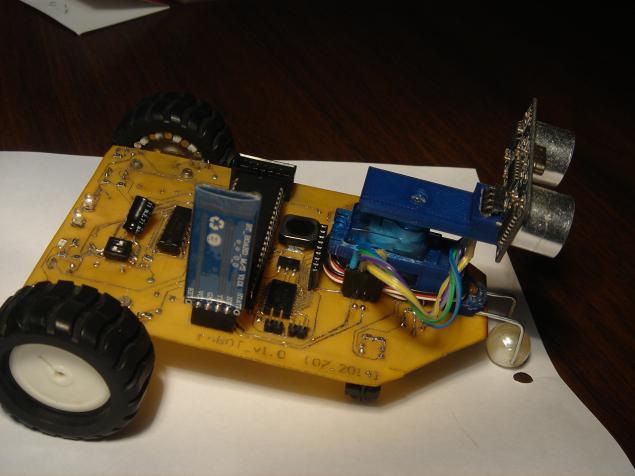
是的,它只是一个珠子,珠子在粗丝,它是迄今唯一未解决的“问题”的设计。事实上,并没有占用第三轮的问题上火podrygat轮捻Servais会面等
从使用1毫米PCB机器人似乎hlyupkim,但因为我们有一个小的质量,这并不影响其力量和敏捷。
那么,首先想骑就行了,可以这么说有自动化控制第一次的经验。
我必须说,我不是一个程序员的职业,这大概是我最薄弱的一点爱好,所以请不要批评太多的代码,在任何情况下,我相信我们将不得不重写整个项目的未来。
写一个实现算法PD测试程序。它由一个中断处理程序ADC和与数据的实际主循环的工作。
的中断处理程序 B>
在第二 I>我的职务,我将介绍如何创建并建立自己的机器人。让我们先从印刷电路板和完成作为第一步骤制造(正确地说 - 滚轮)我们的设备。也可以给节目在PC第一次体验到Qt的,即建立通过蓝牙机器人程序管理和数据交换。
如果你愿意,你可以阅读首次公布并了解这一切是如何开始,好了,每个人都要求猫。

最后一部分结束了,在前面我们穿了一件成品PCB布局,那么它的时间来创造和传递的电子版真实有形的世界我们的想法,是不是在每一个无线电爱好者,工程师,发明家的心燃烧的欲望?!在我的怀里了仅有1mm的PCB,所以我没有想到开始转移到绘图板轨道标准战利品的过程。
我的照片的质量表示歉意,但我有一个便宜的电话......


下一步骤是蚀刻!尝试使用过氧化氢和柠檬酸,当然安全和非常便宜的方法蚀刻的一种新的方式,但似乎过于敏感的组分的比例。后神奇操纵容器的溶液处理的一个小时开始与体面功率(应该说,这是可以改变图案板,然后,将所有的腐蚀快得多)。


主板上的磁迹的80-90%,以获得良好的,但由于基本轨道是0.2毫米,抓媒染剂,我与焊料和细线去掉,因为他们做了同样的孔。在一般情况下,整个过程花了下午3点的焊接。


发动机必须转移到板的底部,因为我意识到我需要董事会和你想去的表面之间的最大差距,但仍机器人转向低矮。
一旦我们想起了电机,召回和编码器的想法,因为我是下令直径字面上毫米比轮槽较小的楼体,他们不得不以某种方式解决这个问题,我们也知道这个概念很简单 - 我刚捡起来驱使他们回到海湾在胶枪的同时,是不是很美观,但很快又实用。最主要的是不要使其反转,这将是到侧板,她那么小 - 12磁体在轮子,那就是, 6激活反过来,并用直径43毫米车轮得到遍历在单个操作中对22毫米轮路径。

董事会,反过来,用小间距的调整把霍尔传感器将了解什么方向移动。

用于固定电池,伺服系统和超声波测距仪已经印上了3D打印机就是一些细节。
电池盒。

持有人的农奴。

超声波测距仪的持有人。

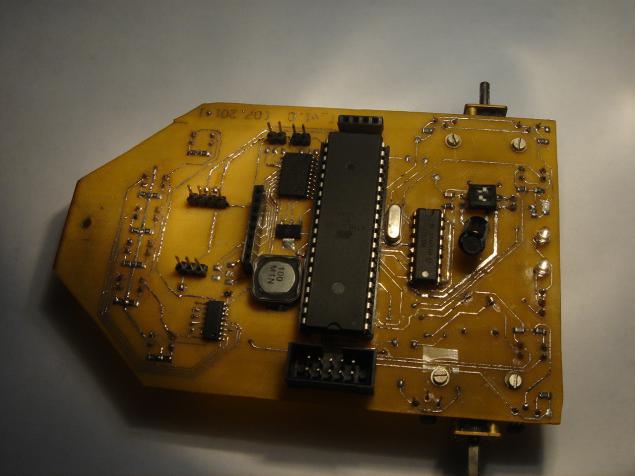
一点点微调的细节文件,一切都陷入的地方,到底变成了这样的机器人。


是的,它只是一个珠子,珠子在粗丝,它是迄今唯一未解决的“问题”的设计。事实上,并没有占用第三轮的问题上火podrygat轮捻Servais会面等
从使用1毫米PCB机器人似乎hlyupkim,但因为我们有一个小的质量,这并不影响其力量和敏捷。
那么,首先想骑就行了,可以这么说有自动化控制第一次的经验。
我必须说,我不是一个程序员的职业,这大概是我最薄弱的一点爱好,所以请不要批评太多的代码,在任何情况下,我相信我们将不得不重写整个项目的未来。
写一个实现算法PD测试程序。它由一个中断处理程序ADC和与数据的实际主循环的工作。
的中断处理程序 B>
<代码>#定义FIRST_ADC_INPUT 2的#define LAST_ADC_INPUT 7无符号整型real_adc [8] = {0,0,0,0,0,0,0,0}; unsigned char型sample_adc;挥发性unsigned char型adc_ready = 0; unsigned char型LED灯[8] = {0×21,×41,0x61,0x63,0x23,0x43中};无符号字符adc_inputs [8] = {0,1,2,4,6,7,3,5};中断[ADC_INT]无效adc_isr(无效)////////////// ADC_INT {静态无符号字符input_index = 0;如果(adc_ready == 0){如果(sample_adc == 0){real_adc [input_index] =(符号int)(ADCW);如果(input_index< LAST_ADC_INPUT-FIRST_ADC_INPUT){input_index ++; }其他{input_index = 0; PORTB =发光二极管[input_index] sample_adc = 1; } ADMUX =(ADC_VREF_TYPE&安培; 0xFF的)+ adc_inputs [(FIRST_ADC_INPUT + input_index)]; ADCSRA | = 0X40; }其他{如果(adc_ready == 0){如果(ADCW> real_adc [input_index]){real_adc [input_index] =(符号int)(ADCW); }其他{real_adc [input_index] =(符号int)(real_adc [input_index]); }如果(input_index≤(LAST_ADC_INPUT-FIRST_ADC_INPUT)){input_index ++; PORTB =发光二极管[input_index] }其他{input_index = 0; adc_ready = 1; PORTB&安培; =〜(1<℃下); } ADMUX =(ADC_VREF_TYPE&安培; 0xFF的)+ adc_inputs [(FIRST_ADC_INPUT + input_index)]; }如果(adc_ready == 0){ADCSRA | = 0X40; }}}}中尉; /码> PRE>
的PID的实施 B> <代码>若(adc_ready == 1){adc_l =(real_adc [1] + real_adc [2]); adc_r =(real_adc [3] + real_adc [4]);误差=(adc_l-adc_r); delta_error =错误 - old_error; // Sum_error + =错误; PID =的Kp *误差+ KD * delta_error +文* sum_error; old_error =错误;如果(PID大于0){pwr_l + =(有符号整数)PID; pwr_r - =(有符号整数)PID; }其他{pwr_l + =(有符号整数)PID; pwr_r - =(有符号整数)PID; }对于(I = 0; I&≤(LAST_ADC_INPUT-FIRST_ADC_INPUT)1;我++){real_adc [I] = 0; } ADCSRA | = 0X40; adc_ready = 0; sample_adc = 0; }&中尉; /码> PRE>
我很高兴地看到,机器人执行分配给它的功能,是不是很确定如何陡峭的影片,绝对流畅和快速linefolower'ami,但对我来说,即使是这样的结果是影响深远。
然后,我平静下来了一点与单片机编程的一部分,并意识到,在未来将需要执行的程序来控制从PC的机器人,并开始研究的Qt,以及作为PC的最新软件,我只在大学里写的(在帕斯卡),这是一些 - 即标准的实验室信息学,我的知识几乎等于零。
offtopic,我的宏伟计划机器人控制与智能手机,我怎么放弃了,得分的想法 B>其实,我最初感到一种冲动,在Android手机编写一个程序,但没有想学习Java,或者说不想远离C,和我有一个朋友,谁在Qt中摸索,这可能是很多要求。起初,我试图了解自己与禅Qbluetooth并尝试对接与HC-05与我的中国嘉裕G3的帮助,但每次我遇到了一个问题,即没有让HC-05和嘉鱼朋友。首先犯了罪的Qbluetooth而事实上,他并不认为HC-05,但在互联网上找到的信息,人们使用QBluetooth或抱怨的朋友对他的艰苦生活后,写自己的图书馆,人们通过蓝牙模块HC开始在线交流1天写了一个程序,并仍设法与机器人进行交流,但遗憾的是通过你的平板电脑。其结果是,证明所有这些,我的中国是不支持RFCOMM,我放弃了,决定写所有的PC。
该方案是切换机器人的模式(在跟进,键盘控制,离线)及发行(套),从利益(伺服系统,传感器,线,超声波测距仪,电机,编码器)的所有传感器的数据。
经过几个星期,写了控制面板的第一个版本控制机器人。很高兴能与GUI Qt中工作 - 方便
程序code'd而不是嵌入的,所以我并没有禁止铜的嘲弄。总之我要说的是程序简单的信号数据的可用性QSerialPort把他们推在标签和窗口小部件,响应计时器,如果需要的话,发送一个预定的数据,如位置和速度伺服电机。在节目绿地是在梦中 - 机器人的位置,前面的未来地图
。
该程序接受的全部信息,并暂时充当一个调试器。尚未实施键盘控制,和离线是非常粗略,只是看到机器人,直到障碍被设置在预定的角度,试图去一个新的方向。在一般情况下,正如我所说,整个项目,直到在软件部分利湿。
在未来,希望推行的是一个小塞子的理解,有必要同时在MC和完全的PC来改变程序雄心勃勃的计划,因为我犯了一个大错误,并开始写这两个节目肿层蛋糕,其中一个测试模块毗邻另一个,而不是一个严格的结构化布线系统。更主要的是不要放弃,并努力直到你心目中的他的头将无法实现在物质世界,因为这是一种业余爱好的意义。
PS在未来,我会尝试写出版的另一部分,可以这么说,我们进入了软件的一部分。
来源: habrahabr.ru/post/256209/
标签
另请参见
Syntol。创造历史
“黑暗之军”。创造历史
男子从大道万capucines:历史片
在广告视频游戏机的历史。在Magnavox公司奥德赛第1部超级任天堂
螺旋状的历史
Hakspeysy中国,部分2,深圳市,航天技术,光电之旅
“角斗士”。创造历史
另一种电动自行车用自己的双手历史:重载
关于此举的另一个故事,这一次荷兰
东京大学的研究人员开发出一种快速亚军双足机器人的新的平衡系统