在3D打印机上打印标签或我们对日本密密甲手
 Bashny.Net
Bashny.Net
电子动画 - 创造,模仿生物的,真实的或想象的动作移动机器人 I>
大约一年前,我被出示一张概念视频«necomimi» - 坦率地说frikovsky小工具。使用两个neyrosensorov阅读大脑信号这猫耳控。很感性的玩具。首先想买她的拆卸和重新组装有些不同。为什么不同?我看了看网上视频讲了很多,这些“咪咪”,并意识到,首先耳朵移动,看起来像笨拙的东西只有一个平面。这些koshariki将耳朵全部自由度。其次与neyrodatchikami一些可疑的技术,这些神经信号。小女孩几乎不能移动他的耳朵,因为如果他们不皱额头,试图蛋卷冰淇淋。有人甚至哭了起来。
我们都将是不同的:耳朵可自由在两个平面移动,并管理他们会简单地按下遥控器上的一个按钮。而对于每一个按钮,拿出你的程序特殊效果。短。收集编程运动简单的机器人模拟电子动画的猫的耳朵的运动。
我们需要什么? B>
1.镘刀的微控制器的Arduino纳米或 MP1511
2.四个伺服系统。微型或小型。 180度。
3.五个按钮和开关
4.电源5-6(4笔形电筒电池,甚至更好poverbank智能手机)
5.小丝,焊接
6.螺纹
针 7.两个瓣感受到不同颜色的布
8.一对夫妇的空闲时间
小时 9.但最重要的是 - 获得了3D打印机。然后,它会打印框架的耳朵和运动学。
10.免费晚上))
文件标签框架和轮圈安装舵机奠定了在我们的网站上STL-文件的形式在此页 A >。它们适于打印的MC3。但是,然而,它们可以被打印在任何三维打印机。房屋控制器和按钮每个人都可以拿出自己。
打造运动 B>
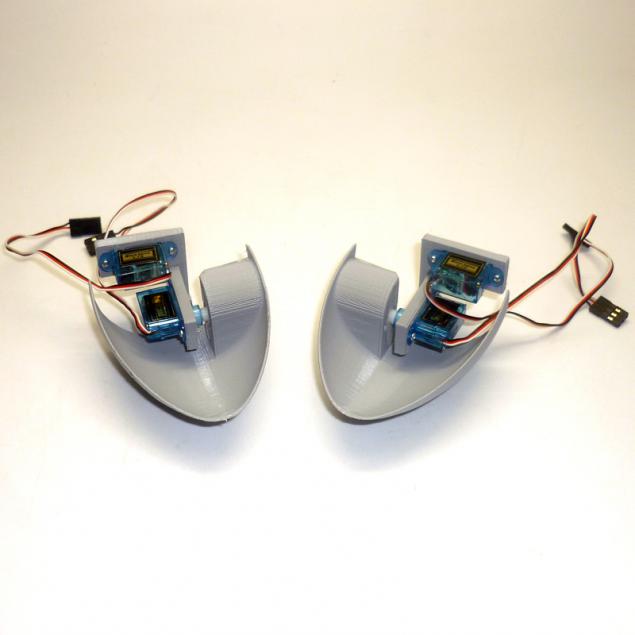
当所有的项目将被打印出来,进行组装。试剂盒用于每个耳朵被分成三个部分:标签本身,这两个部分用于紧固servomotorchikov。
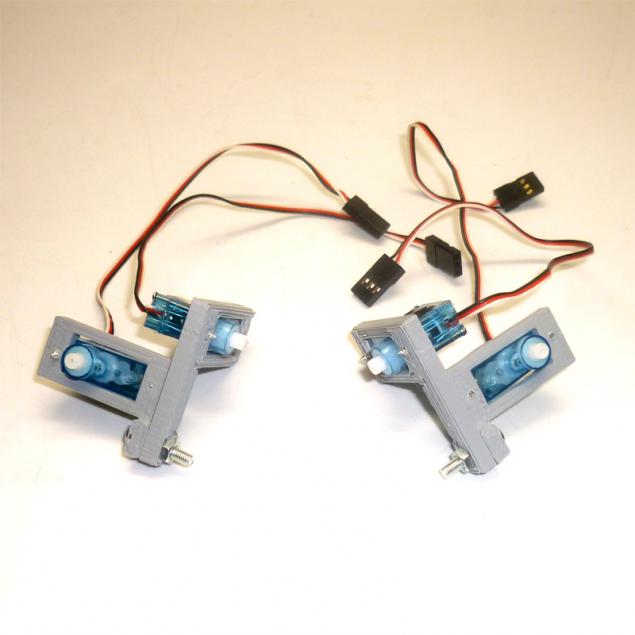
紧固螺钉和螺母部件servomotorchikov如该图所示。应该得到两个对称的框架:

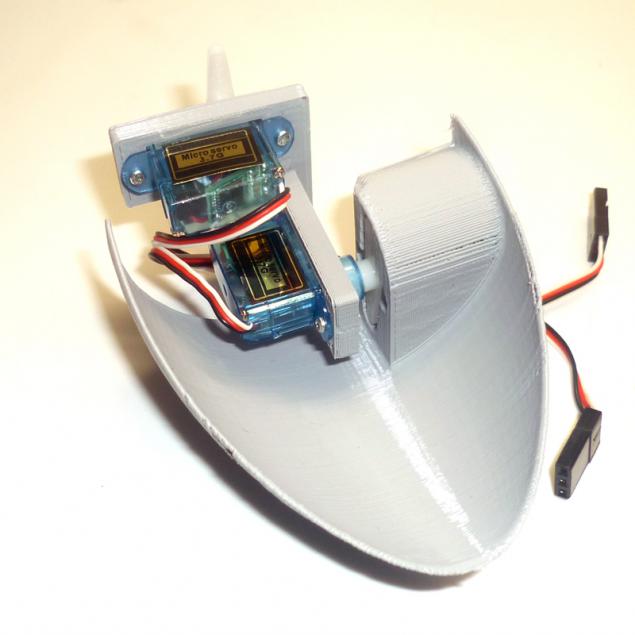
关于以前提出的帧附加的伺服如图中所示。需要三个螺丝 - 两大一小(伺服总是完全用螺丝)。两个大螺丝拧本身伺服和一个小摇其轴线。
附加耳朵 B>
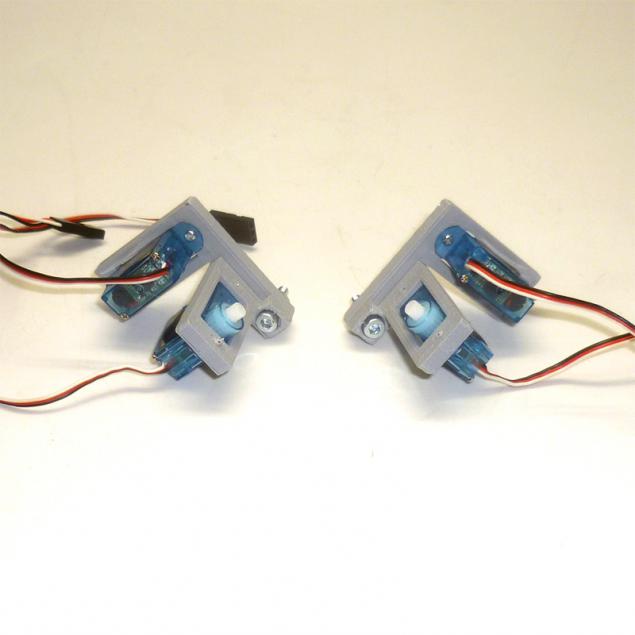
首先要对居中车轴。轴伺服只能移动180度。礼服长轻摇滚动轴的轴,我们发现极值点,我们推导出轴的中间,取出并重新建立了摇摆自己的身体垂直于舵机。第二伺服被安装在轮辋中心的方式相同。
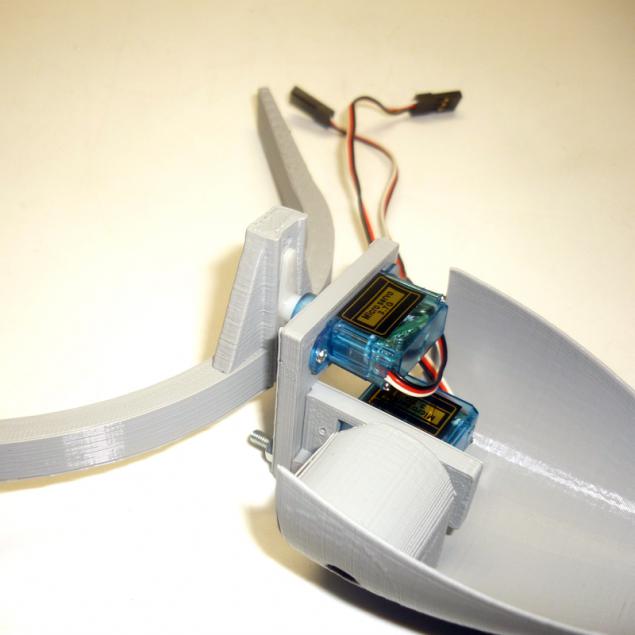
此外,通过安装伺服小螺丝固定在机器上的耳平台孔。仔细看一下图纸:
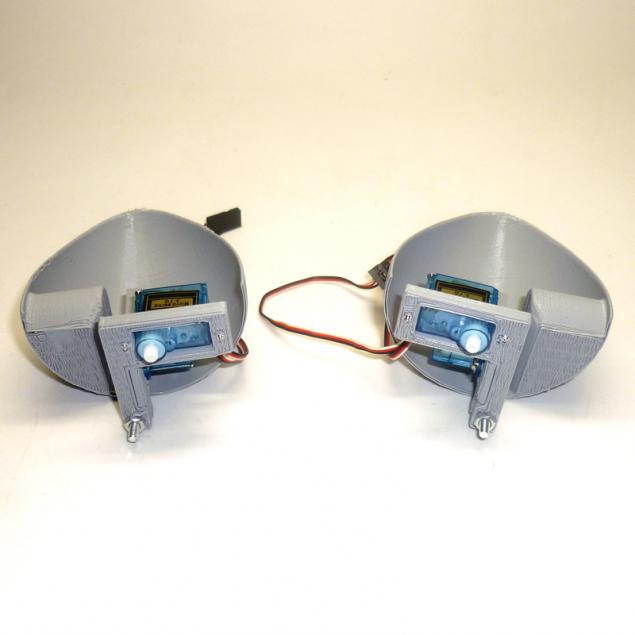
由耳缘通过孔连接小螺丝。要充分了解,考虑图纸:
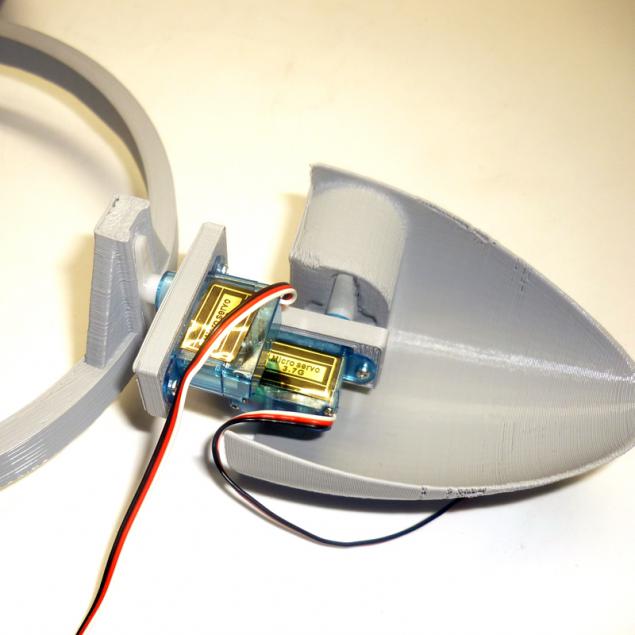
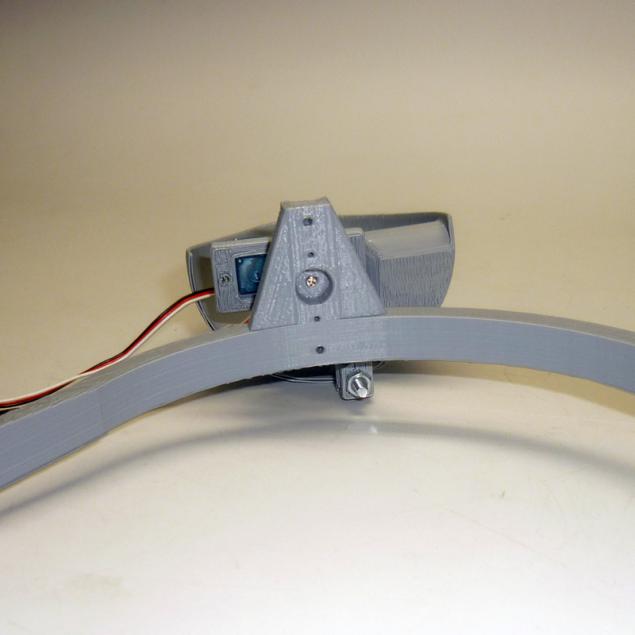
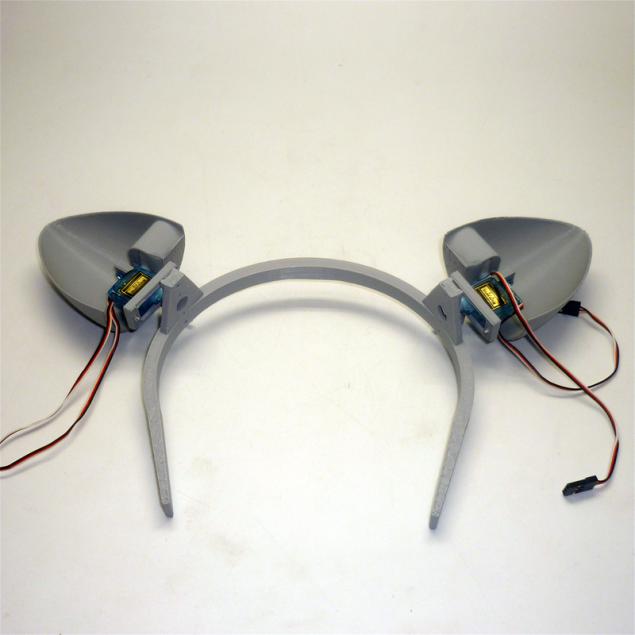
其结果是,我们得到:
电气计划的
Servomotorchiki耳朵由控制器的Arduino纳米或MP1511控制。素描下载的Arduino微控制器也可以从我们的下载。
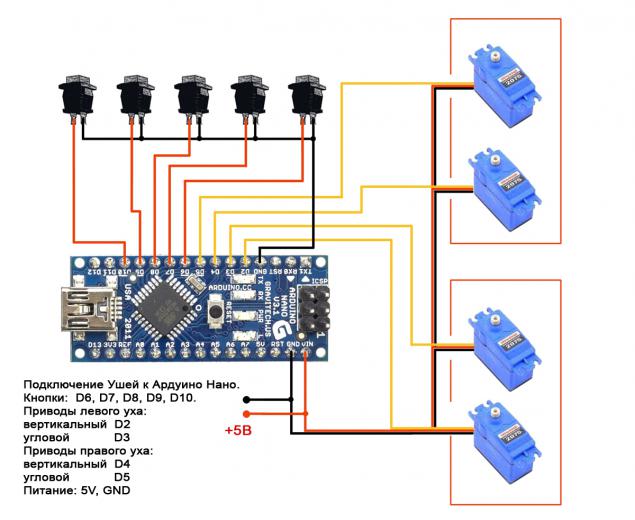
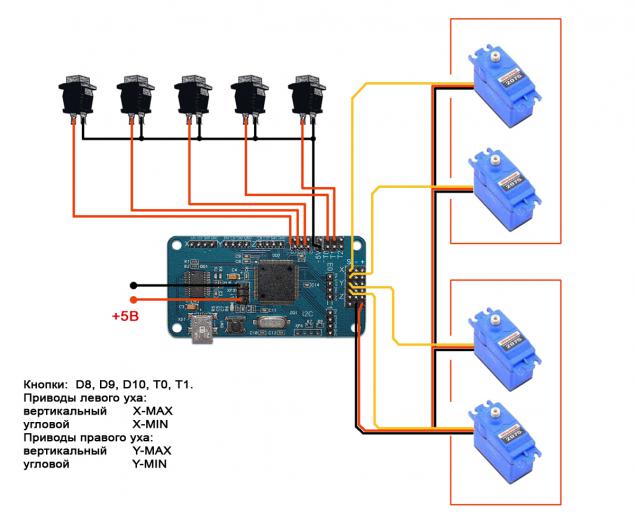
对于耳朵被发明5的特殊效果,其中的每一个通过按下一个按钮激活。它们是:挥舞着他的左耳,右耳挥舞着,挥舞着两只耳朵,两只耳朵降低,取消两个耳朵。但是你可以拿出自己的作用,并转换草图。
现在,让我们来比较。
我们的甲手:
日本咪咪:
法师套装 - 我们的DIY方向提供了素材。
来源:
大约一年前,我被出示一张概念视频«necomimi» - 坦率地说frikovsky小工具。使用两个neyrosensorov阅读大脑信号这猫耳控。很感性的玩具。首先想买她的拆卸和重新组装有些不同。为什么不同?我看了看网上视频讲了很多,这些“咪咪”,并意识到,首先耳朵移动,看起来像笨拙的东西只有一个平面。这些koshariki将耳朵全部自由度。其次与neyrodatchikami一些可疑的技术,这些神经信号。小女孩几乎不能移动他的耳朵,因为如果他们不皱额头,试图蛋卷冰淇淋。有人甚至哭了起来。
我们都将是不同的:耳朵可自由在两个平面移动,并管理他们会简单地按下遥控器上的一个按钮。而对于每一个按钮,拿出你的程序特殊效果。短。收集编程运动简单的机器人模拟电子动画的猫的耳朵的运动。
我们需要什么? B>
1.镘刀的微控制器的Arduino纳米或 MP1511
2.四个伺服系统。微型或小型。 180度。
3.五个按钮和开关
4.电源5-6(4笔形电筒电池,甚至更好poverbank智能手机)
5.小丝,焊接
6.螺纹
针 7.两个瓣感受到不同颜色的布
8.一对夫妇的空闲时间
小时 9.但最重要的是 - 获得了3D打印机。然后,它会打印框架的耳朵和运动学。
10.免费晚上))
文件标签框架和轮圈安装舵机奠定了在我们的网站上STL-文件的形式在此页 A >。它们适于打印的MC3。但是,然而,它们可以被打印在任何三维打印机。房屋控制器和按钮每个人都可以拿出自己。
打造运动 B>
当所有的项目将被打印出来,进行组装。试剂盒用于每个耳朵被分成三个部分:标签本身,这两个部分用于紧固servomotorchikov。
紧固螺钉和螺母部件servomotorchikov如该图所示。应该得到两个对称的框架:

关于以前提出的帧附加的伺服如图中所示。需要三个螺丝 - 两大一小(伺服总是完全用螺丝)。两个大螺丝拧本身伺服和一个小摇其轴线。


附加耳朵 B>
首先要对居中车轴。轴伺服只能移动180度。礼服长轻摇滚动轴的轴,我们发现极值点,我们推导出轴的中间,取出并重新建立了摇摆自己的身体垂直于舵机。第二伺服被安装在轮辋中心的方式相同。
此外,通过安装伺服小螺丝固定在机器上的耳平台孔。仔细看一下图纸:



由耳缘通过孔连接小螺丝。要充分了解,考虑图纸:



其结果是,我们得到:

电气计划的
Servomotorchiki耳朵由控制器的Arduino纳米或MP1511控制。素描下载的Arduino微控制器也可以从我们的下载。


对于耳朵被发明5的特殊效果,其中的每一个通过按下一个按钮激活。它们是:挥舞着他的左耳,右耳挥舞着,挥舞着两只耳朵,两只耳朵降低,取消两个耳朵。但是你可以拿出自己的作用,并转换草图。
现在,让我们来比较。
我们的甲手:
日本咪咪:
法师套装 - 我们的DIY方向提供了素材。
来源:
标签
另请参见
完全能自主或如何与省内太阳能电池板(第2部分实用)生存
如何使一个舞蹈垫跳舞机
完全能自主或如何与省内太阳能电池板(第1部分理论)生存
一个小电脑桌的大创意
和谐形象
发明 - 发明家。或者为什么你不需要一个巨大的打印机
五样东西,可以印上3D打印机:部分№1,服“钢铁侠”
Kubotronik - 路径到一组骰子
由于尼古拉·特斯拉预计我们的世界