沃尔沃一直在设计无人驾驶汽车
 Bashny.Net
Bashny.Net
沃尔沃汽车在本周<一个href="https://www.media.volvocars.com/global/en-gb/media/pressreleases/158276/volvo-cars-presents-a-unique-system-solution-for-integrating-self-driving-cars-into-real-traffic">объявила完成了设计工作,以创建一个汽车的自动驾驶仪,这是计划在两年的道路上。
瑞典公司希望能够发布一个商业版本早于日产,谷歌,谁是目前正在进行测试,其他竞争对手。
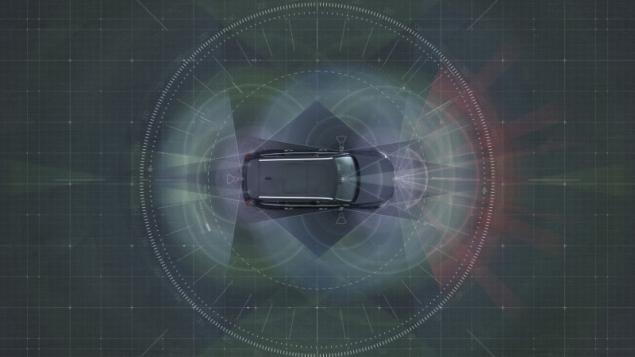
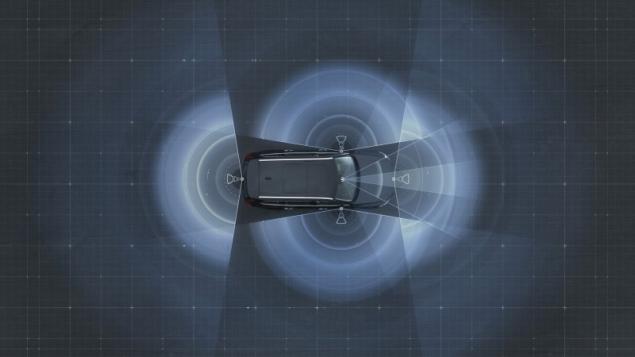
设计“雄蜂»沃尔沃包括28照相机,激光,传感器和雷达扫描仪和三维地图在高分辨率和GPS定位的区域。
这里是在设计中的一些细节。
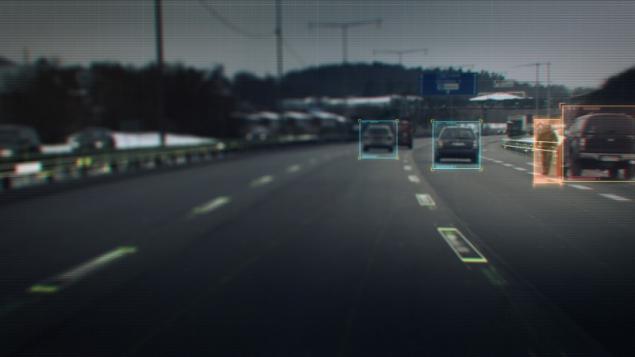
结合雷达和摄像头 B>。雷达频率在76千兆赫和摄像机安装在挡风玻璃的顶部。他们认识路牌,巷道扫描的特点和区别其他车辆在道路上。

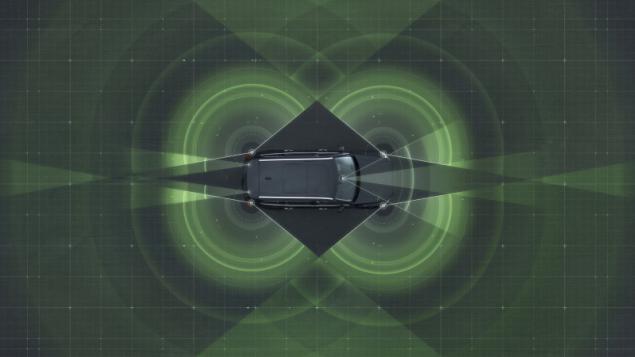
雷达周边 B>。四个雷达在保险杠后方本体的角部提供一个360度的图。

在外线的相机 B>识别周围的物体,并带标志的道路上。两个照相机都位于后视镜,一个在后保险杠,另一个在格栅。

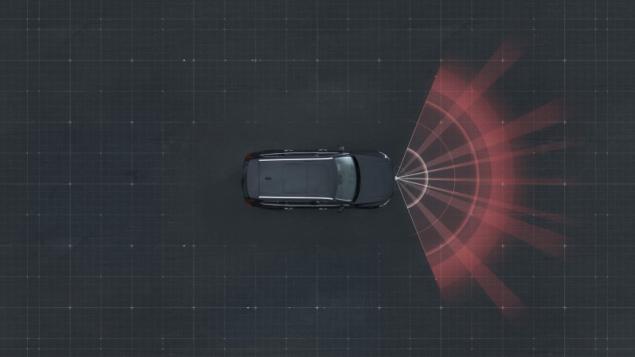
的多光束激光扫描的被集成到前保险杠和扫描150米区域在前方,识别行人不可见的眼睛(例如,后面灌木或栅栏),其他车辆和其它物体。
Trёhfokusnaya相机 B>:三个摄像头不同的焦段在一个模块中提供的感知距离的基本形式。在视140°的第一相机领域,所述第二45°,并且第三“远程” - 34°。比较图像与三个摄像机,自动驾驶仪确定的对象和它们之间的距离。

远程雷达 B>:安装在后保险杠下的两个这样的雷达和跟踪发生了什么后面的车。其读数用于下一车道重建。

超声波传感器的:12个传感器散布在整个身体,它们在相同的原理停车传感器正常工作,确定在低速行人和其它物体的接近


三维地图的区域被装入汽车最初,并通过因特网接收更新。

“自动驾驶仪不带司机将从根本上改变我们看车的方式,” - 说彼得·梅尔滕斯(彼得·梅尔滕斯),沃尔沃的研究部门的负责人。他认为,该行业进入到“未知”的领土,她必须克服对符合严格的安全要求的困难。
梅尔滕斯说,沃尔沃的工程师们设计的情况下,自动驾驶仪的不同节点失败的备份系统,以及无人驾驶车辆应对紧急情况“比一般人更快”。
“这是不够的,做出这样一个复杂的系统是99%可靠的 - 专家说。 - 有必要开始与真正的驱动程序»实际道路驾驶仪前,接近更接近100%
。
沃尔沃计划开始约100无人机在哥德堡的大街质量测试在2017年
来源: geektimes.ru/post/246246/
标签
另请参见
第三帝国的鲜为人知的飞机
无人驾驶车辆Tesla会的道路上,在5-6年
这一概念的无人驾驶公交
SpaceX公司采取人类火星在10-20年
军事KAMAZ 63968“台风”
什么是未来
10技术在未来10年
10最昂贵的机动船
特斯拉的模型3的10倍比较安全的平均车