Conquistadores de los otros planetas (25 fotos)
 Bashny.Net
Bashny.Net
Este año, la atención del mundo se ha señalado a Marte, donde los estadounidenses se tomaron y donde se utilizan con éxito su Espíritu Planetario y Opportunity.
Nuestra participación, como suele ser el caso en los últimos años, sigue siendo sólo para compartir la alegría de los estadounidenses y consolarnos que una vez fuimos capaces de ejecutar las máquinas en otros planetas.
(Una de las tiendas VNIITM)
El principal desarrollador del chasis para vehículos exploradores planetarios (ruedas, motores, tracción, suspensión, dirección ellos) en la Unión Soviética era (y sigue siendo hasta ahora en ruso) Leningrado VNIITransmash (VNIITM). Esta institución desarrolla principalmente chasis para los tanques, por lo que se acumuló una amplia experiencia en el ámbito del transporte de carretera, ya que la propiedad común de los rovers de tanques y planetarios -. El movimiento en terrenos preparados


(STR-1 robot para limpiar el techo de los residuos radiactivos de Chernóbil)
Fue creado y probado un montón de variedad de dispositivos - Lunokhod 1 y 2 (1970), caminando rovers planetarios enviadas a Marte en 1971, saltando a Fobos (1988), un robot para limpiar el techo de la Unidad de Chernobyl destruido (1986), rovers planetarios para una expedición fallida Mars-96, varios exploradores planetarios en cooperación con organizaciones extranjeras (en los últimos años), etc.

(Aparato salta para el estudio de Fobos)

(Caminando máquina para Marte PROP exploración v M, 1971)

(Rover TRACK-pie)
Rueda de rovers planetarios debe combinar simultáneamente muchos requisitos - para decir unas palabras sobre cada uno artículo no es suficiente. Así que echemos un vistazo a algunas opciones de ruedas VNIITM creados desde el momento de Lunokhod hasta nuestros días, destacando sus principales características.
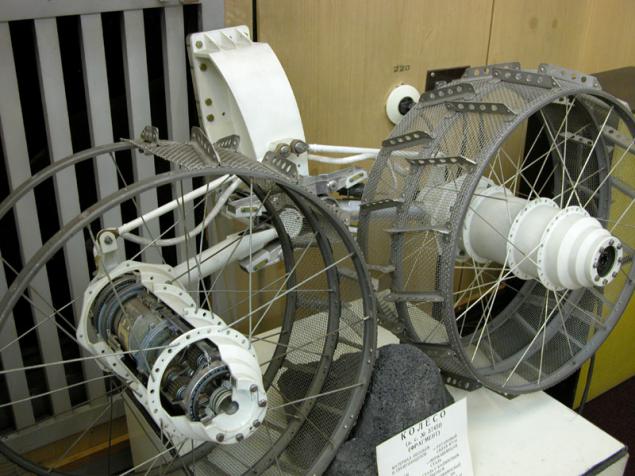

(Ruedas Lunokhod)
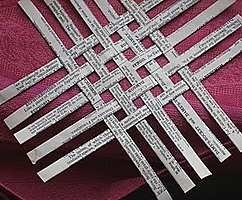
Rover rueda ya se puede considerar un clásico. La mayoría de los modelos posteriores y verdadero nada rovers planetarios, pero tomaron prestado de ellos. Ruedas constan de tres llantas de titanio fijados sobre una malla de acero con terminales de la misma titanio. Reliance sobre una superficie sólida se produce, en promedio, la llanta en el mismo borde de suelo blando penetra profundamente y luego ejecutar la cuadrícula.


(versiones de prueba de ruedas para Lunokhod)
Estas son las dos ruedas para una versión de prueba Lunokhod. Podressorivaetsya rueda, en un caso por una tira metálica elástica en el otro -. Con la ayuda de resortes a lo largo de un eje de la rueda cilíndrica

(versiones de prueba de ruedas para Lunokhod)
Otra opción - es la superficie exterior de la rueda está hecho de malla elástica, pero coloca una red de resortes planos que funcionan cuando debajo de la rejilla prominaetsya estrés. Perfil de la rueda evita el deslizamiento lateral. Patillas (media) operan principalmente por cuadrícula subsidencia en tierra firme.

(versiones de prueba de ruedas para Lunokhod)
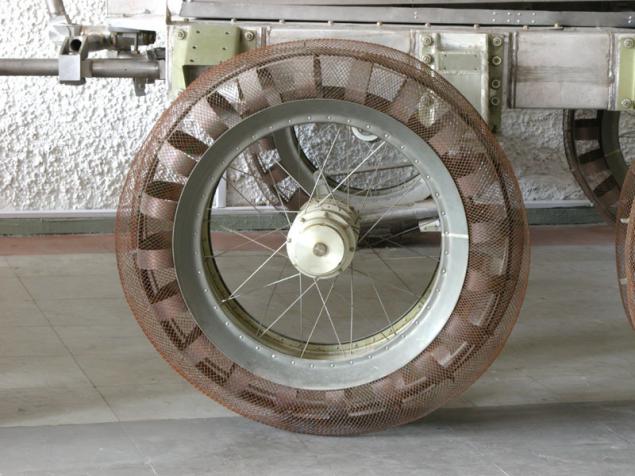
Para planetas con gravedad fuerte (Marte, la Tierra) en endebles malla abandonado en favor de una superficie continua con orejetas (rueda de vaina). En el caso de los vehículos de exploración, los científicos procedieron de las primeras fotografías de "Viking", donde la superficie de Marte se ve rocoso.
Estas ruedas se utilizan más adelante en el proyecto IARES (1993) y PP-1 (1986)

(Rueda IARES)
Como puede observarse, en todos los diseños de intentar proporcionar una buena adhesión a la imprimación (orejetas, de malla), peso ligero (no hay discos sólidos y posiblemente radios de cuadrícula o la rueda sólido, pero hueca), de amortiguación (agujas, resortes, etc.) medidas contra el deslizamiento lateral (perfil característico convexa o cóncava).
Casi todos rueda planetaria de la rueda es un solo (a menudo incluso sellado) módulo, que también incluye reductor, motor, frenos, los sensores necesarios. Tal módulo llamado "motor-rueda". El uso de ruedas a motor permite, junto con la suspensión, para proporcionar la igualdad de carga en todas las ruedas y el uso eficiente de la capacidad en un terreno desigual, con las ruedas cuelgan en el aire, etc.
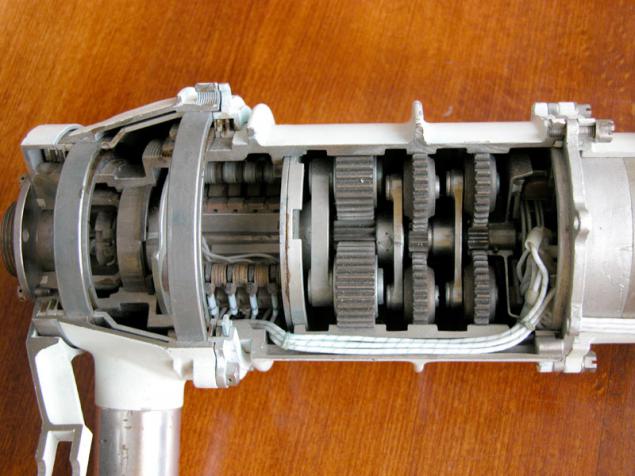
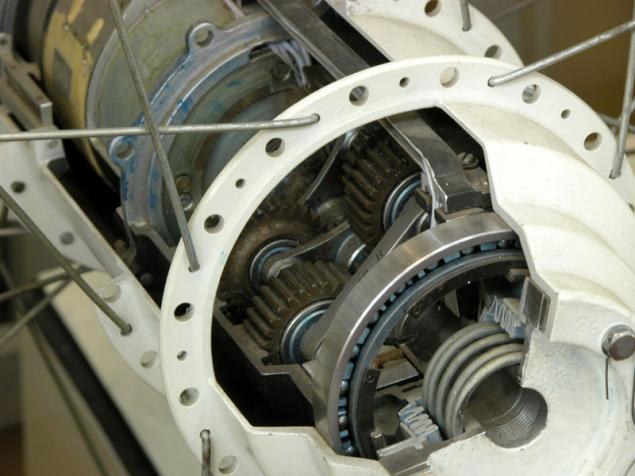
(Sección de motor-rueda)
Si consideramos las ruedas de paletas en general, surge la pregunta - ¿por qué rovers planetarios, Lunokhod, en particular, ya que las ruedas?
En primer lugar, hasta el último momento no impedía el uso de las vías. En el caso del rover 8 ruedas no requeriría una revisión completa de la estructura. En segundo lugar, la reducción de la carga en el suelo. Por último, la fiabilidad - actuación en el fracaso de varias ruedas.
En el caso de atasco las ruedas motrices Lunokhod contienen mecanismo de liberación especial. Carga pirotécnica en el comando de la Tierra podría matar el eje y como resultado de las ruedas bloqueadas defectuosos sería impulsada. Cuatro ruedas por lo que sería imposible. Afortunadamente, esta posibilidad no se ha utilizado ni una sola vez.
Haga suspensión independiente para cada motor-rueda. Esto permite superar las pequeñas protuberancias y depresiones evitando los bancos fuertes de toda la máquina y la sobrecarga de los motores individuales. Lo ideal sería que cada rueda en un momento dado se debe tocar el suelo, y con aproximadamente las mismas cargas de interactuar con él. Esto se consigue no sólo la mecánica, sino también la parte electrónica, calcula la carga sobre el motor y la suspensión. La parte mecánica de la suspensión se realiza generalmente en forma de palancas, en el que el elemento elástico como torsiones utilizados - varillas de acero o de titanio, que constituyen el "resorte" de la torsión. El uso de la hidráulica problemáticas, debido a las fuertes variaciones de temperatura en la superficie de los planetas.

(Torsión)
Instructivo historia de la muerte del Lunokhod-2 - que estableció un nuevo sensor de ajuste de inclinación (toda la automatización unidad Lunokhod-2 fue desarrollado por triplicado - de máquina tripulada)
. El sensor en el Lunokhod-1 fue desarrollado por VNIITM, pero consideró que la empresa de construcción de maquinaria debe ocuparse de su propio negocio y el desarrollo de nuevos sensores asignado a otra organización.
Los nuevos sensores se utilizan anticongelante. Sin embargo, no se consideró una pequeña fuerza de la gravedad en la Luna. Como resultado, inmediatamente después del aterrizaje lunar, el sensor demostró ser inoperante. Pero este sensor debe protegerse de inclinar Lunokhod - automáticamente detenerlo, si la pendiente es demasiado grande (de pasada - da una idea de la geometría de la superficie lunar). Aquí demostró que Lunokhod se sitúa en un ángulo de 40 grados antes de la salida del módulo de aterrizaje.
Tuve que ir sin codificador, centrarse sólo en lo que se ve a través de la cámara - horizonte y nivel simple - bola de metal Kata. Todo iba bien, pero en el tercer mes Lunokhod condujo en una bastante grande cráter. Se quedó allí con batería solar abierto y recargada. Cuando llegó el momento de salir del cráter, subestimado el ángulo de inclinación. Como resultado, la máquina está atrapado por la batería solar, se molió, lo que conduce a una caída en el poder. Los intentos de quitarse de encima el suelo sólo agravaron la situación - el suelo para mantener el compartimento interior. Así terminó su vida Lunokhod 2.
Por cierto, el Lunokhod-1 incluso menos afortunados - al comienzo del lanzador explotó. Así que el Lunokhod-1 que ha estado en la luna - no es el primer caminante lunar.
En cualquier caso, Lunokhod 2 en la luna era mucho mayor distancia - 40 kilometros 3 meses de Lunokhod 1 a 10 kilómetros. durante 10 meses. Afectada la experiencia adquirida investigadores y conductores.

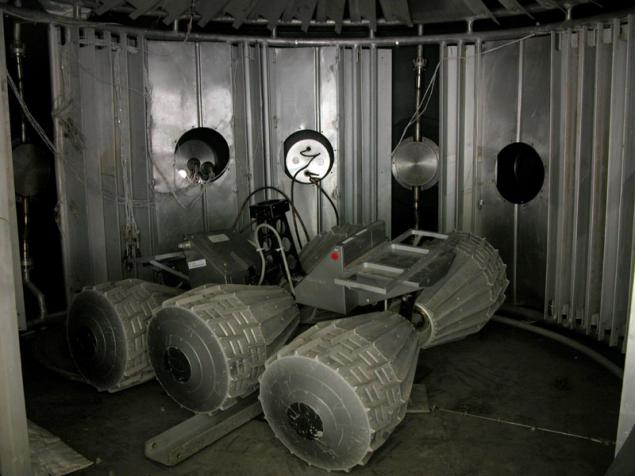
(Cámara para simular la atmósfera de los planetas y el rover en ella)
Gran radio de giro se convierte en un problema cuando cerca de una roca o grieta donde la unidad puede splozti al girar.
La solución más común es tomado de vehículos con orugas: hacer varias revoluciones de la rueda en la parte izquierda y derecha de la máquina (en el caso más simple, el uso de los frenos), se puede implementar prácticamente en el acto
. Este enfoque también simplifica la construcción, aumenta la fiabilidad, ya que no tiene que hacer de ricino. Un ejemplo bien conocido - el "Lunokhod" (1970)
.
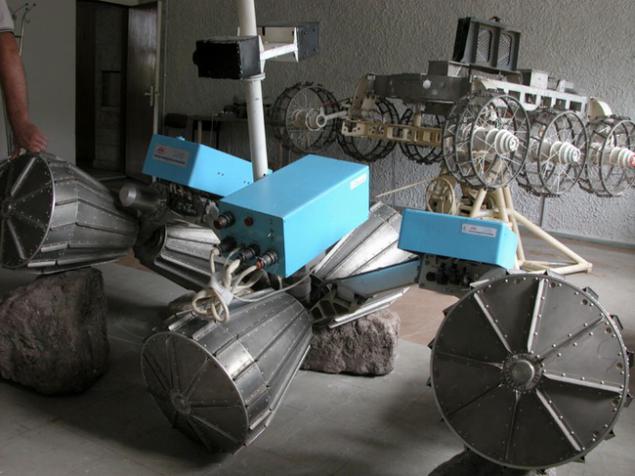
(Chasis para Lunokhod)
Planetario probado en Asia Central, en Kamchatka (en zonas con erupciones frescas) - que era una gran variedad de formas de alivio ... No se sabía de antemano lo que el suelo, por ejemplo, en la luna. Se ha sugerido que el suelo se suspende y Lunokhod puede simplemente ahogarse. Por lo tanto, también se llevaron a cabo pruebas en los campos de nieve -. Donde la nieve llena de arena volcánica
En los planetas donde ahora es posible entregar rovers planetarios, hay un conjunto de piedras, bancos rocosos, cráteres. ¿Qué futuro para la máquina de caminar probablemente no será un problema (ver, la mayoría de la gente supera fácilmente los obstáculos que son insuperables para las ruedas) para vehículos de exploración planetaria de hoy problema es muy urgente.
Imagine una situación en la que el coche normal se encuentra con una brida en la gran piedra. Hay un rollo de toda la máquina y la máquina corre el riesgo de vuelco. Para Rovers planetarios tal comportamiento es inaceptable, ya que la suspensión está dispuesto mucho más difícil - cuando una de las ruedas en movimiento la piedra, el otro puede llevar la máquina completamente horizontal.
Pero incluso esto puede no guardar, si la piedra será en la parte inferior del Planetario y "sentarse en su vientre." Por lo tanto, la distancia al suelo (depuración) están tratando de hacer lo máximo. Aumentar el espacio libre, a su vez, puede conducir a la inestabilidad del dispositivo - el centro de gravedad lo más bajo posible (incluso los proyectos se pusieron las pilas dentro de las ruedas motrices, sino que conduce a otros problemas).
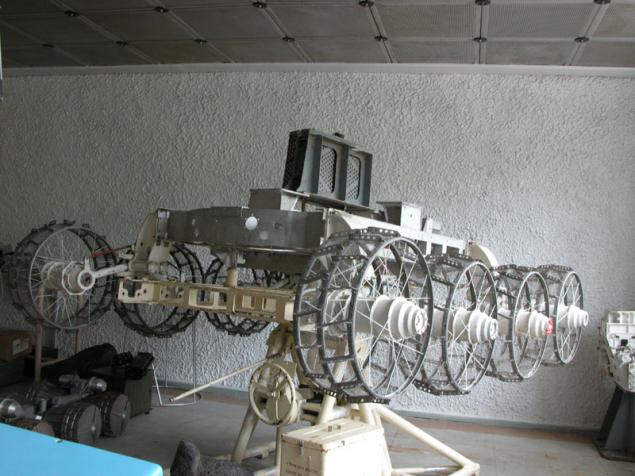
Una solución interesante es ilustrado por quizás el sistema más perfecto, que fue desarrollado VNIITM titulado "Paz" (1988), "Lama» (1994-1995), J-Rover (1996).

(World / LAMA / J-Rover)
Prácticamente no hay espacio libre - no el fondo, en lugar de él - bisel de la rueda de engranaje. Si por ellos consigue atasco de roca se produce porque orejetas están situadas a lo largo de toda la longitud de la rueda. Hay, sin embargo, y la falta de -ostaetsya poco espacio para acomodar una carga útil (una posible solución - para colocar la batería dentro de la rueda). En otro orden de cosas - IARES - en lugar de engranajes cónicos se utilizan generalmente en conjunción con rodillos, también tienen orejas
.
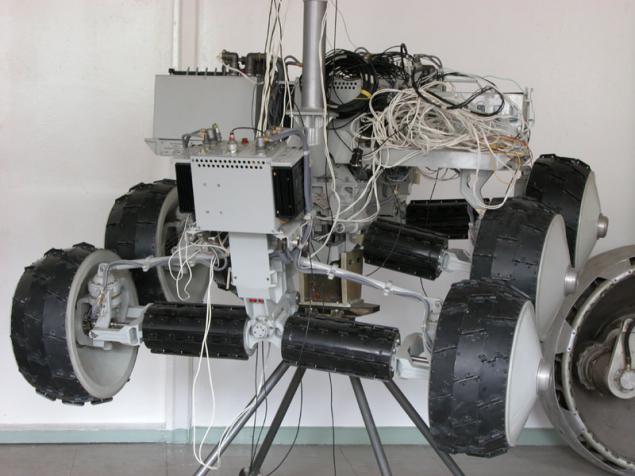
(IARES)
Curiosamente, los engranajes cónicos en un momento fueron comprados a VNIITM McDonald Douglas, que se va a hacer rovers planetarios. Sin embargo, los vehículos exploradores estadounidenses desarrollaron en el JPL, quien se fue a su manera. En la misma época el desarrollo Lunokhod en ambos lados llevados a cabo en secreto, así que era completamente independiente.
Cada par de ruedas puede girar independientemente en un ángulo de aproximadamente 40 grados, y moverse hacia arriba y hacia abajo con respecto al otro par. Entre otras cosas, esto permite un compacto rovers planetarios plegados durante el transporte en una nave espacial.
Otra posibilidad de la unidad de rueda es, por extraño que parezca, la estimulación. Debido a la sección de motor adicional puede moverse ligeramente separados unos de otros. Bloquear alternativamente un par de ruedas y el impulso de otros pares puede ser, aunque no rápido, pero fácil de superar el obstáculo.
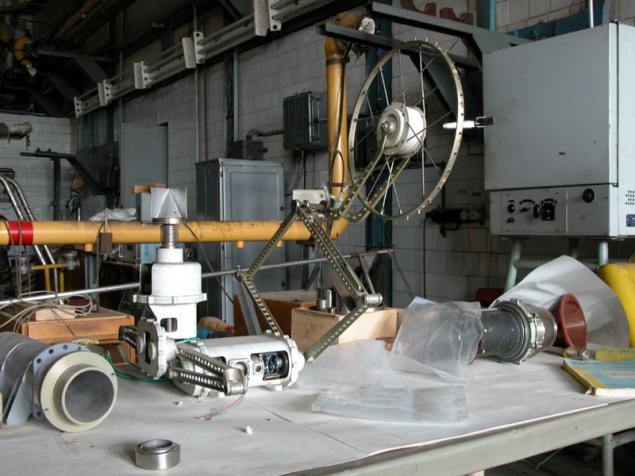
Otra opción de estimulación se ha implementado en el coche «EOSAIII-1" (1978).


(EOSA III-1 Nota:. Las patillas son estaño cerrado)
Aquí, cada una de las seis ruedas puede funcionar en dos modos - Roll (rotación alrededor del centro) o caminar (rotación alrededor de un desplazamiento desde el centro de la rueda punto)
Todos.
Fuente -
Tags
Vea también
Si en lugar de la luna eran otros planetas del Sistema Solar
China - no es más que otro país, es otro planeta
Stephen Hawking insta a la humanidad a colonizar otros planetas para sobrevivir
NASA enviará un CubeSat mini-satélites a otros planetas
¿Y si la luna estuviera en su lugar otros planetas? Gracias a las maravillosas fotos es fácil de ...
¿Cómo se vería una metrópoli moderna en otros planetas
7 señales de que otros planetas podrían albergar vida
Evolución de los extranjeros en la película
Distribuidores Secret Grandes
Turbas divertidos e inusuales en flash