Electronic control suspension
 Bashny.Net
Bashny.Net
Respected community, I present to you a progress report on crossing my two hobbies: mountain biking and microelectronics.
So, this article will focus on the development of the domestic electronic control suspension mountain bike. I will not torment the long entry, right to the photos and videos:
12 pictures + description + video examples

Now the details.
Problem:
With active pedaling on the bike dvuhpodvesnom spent a large proportion of the energy build-up rider on a bike suspension, this is true for both the rear and front suspension. The rear suspension is subject to the buildup almost always, the front suspension is mainly exposed when pedaling "standing." To make it clearer, imagine that you are standing next to the mountain bike that has a suspension fork and hands pressed cyclically / presses plug to the ground. To do this, you are wasting your energy the same way your energy is spent completely useless when you pedaliruete intensively (eg a mountain). That is, if it were not "swinging" shock absorbers, all the energy goes to the beneficial business - pedaling.
To solve this problem have been developed and implemented by different manufacturers are numerous mechanical suspension system damping swinging. Such as Motion Control by RockShox and Terralogic c ProPedal by FOX and others.
We can not agree that such mechanical systems certainly improve the efficiency of pedaling, but still does not completely eliminate power dissipation, since all of these solutions are "passive».
In other words, the mechanical systems do not account for different environmental conditions, such as:
DvizheniyaKadens speed (cadence) The nature of the road surface is why, in recent years the major bicycle manufacturers have developed "active" suspension control systems that take into account the above ambient conditions, thanks to the different sensors:
Reed speed and kadensaDatchiki uskoreniyaIdeya:
As usual it was adopted in our country, the problem was posed as follows: "To surpass foreign analogues in performance characteristics in a few times!". Namely, that those foreign goods had to catch up technologically and overtake on the following parameters:
EffektivnostGabarityVesVozmozhnost pairing system with bluetooth устройствамиИнтеллектуальностьДешевизнаДоступностьЛегкость installation on existing equipment (fork and Amort) with a minimum модификациейРемонтопригодностьОтказоустойчивостьВозможность modifications of hardware (upgrade) The ability to modify the software part (upgrade) Hours from one zaryadaChego achieved:
1. Efficiency
Firstly, in contrast to foreign analogues, control is simultaneously the front and rear suspension.
Second, the hardware (MCU) allows you to implement any algorithms for managing suspension, using public funds, namely the programming language C ++.
2. Dimensions
Specially selected components are so small that they allow to place them in the stock fork. That is the "brain" and the battery are placed directly in the free space stock fork.
Thus the size of the control element does not exceed 200mm in length and 22mm in width. The real dimensions are approximately: 150h19.
The result is an elegant solution, which can not even see, and most importantly, nothing sticks out and does not take the right place as it is done here (bulky battery pack is attached in place of vital water bottles with water):

3. Weight
For those who are unfamiliar with cycling I will explain that the weight is one of the basic indicators for critical equipment used in bicycle competitions. For this reason, the criterion was allocated special attention. As a result, weight gain about 120 grams. In this part:
4. Intellectual
Sensors and programmable microcontroller to implement any algorithm in a high level language c ++. As a result, the following features are implemented at the moment:
Manual
In this mode the user can control locks the front and rear shock absorbers (together or separately) through the buttons located under the neoprene grips (a rubber knob on the steering wheel). The work of this regime can be seen in the video above. Despite its simplicity, this option is very convenient and useful feature, because the levers lock shock is very difficult to twist arms when moving the bike, especially at high speeds.
Semi-automatic mode
Mostly, this mode is designed for new shock absorbers from the company FOX, which have levers CTD. The basic idea for this mode was the involvement in the maximum mechanical characteristics of the shock absorbers. That is the system, depending on the sensor must select one of three modes CTD (Climb-Trail-Descent), giving all at the mercy of the logic of optimization of the shock absorbers on themselves. The mode is selected by turning the actuator at a certain angle corresponding to a particular operating mode of the shock absorber.
At this point, CTD modes are selected on the basis of the angle of the bike. In other words how it works:
Bike riding uphill - included Climb rezhim.Bayk travels in a straight line - Trail rides rezhim.Bayk the mountain - Descent mode. Limits transition from mode to set (the catch inclination in degrees). Also, the transition from the timeout mode to also configurable.
This mode has been designed specifically for a highly respected rider (will not be named, because the agreement is), but at the last moment he changed his sponsor, and installation of the system on its new bike has become impossible.
Here's how it works:
Automatic mode
It is the most interesting and complex mode, is designed as a way to increase the maximum pedaling efficiency by intelligent on / off damper lock it is in those moments when you need it.
For the implementation of the regime have been allocated a number of possible states of the system and the rules of transition between them, in short, it looks like:
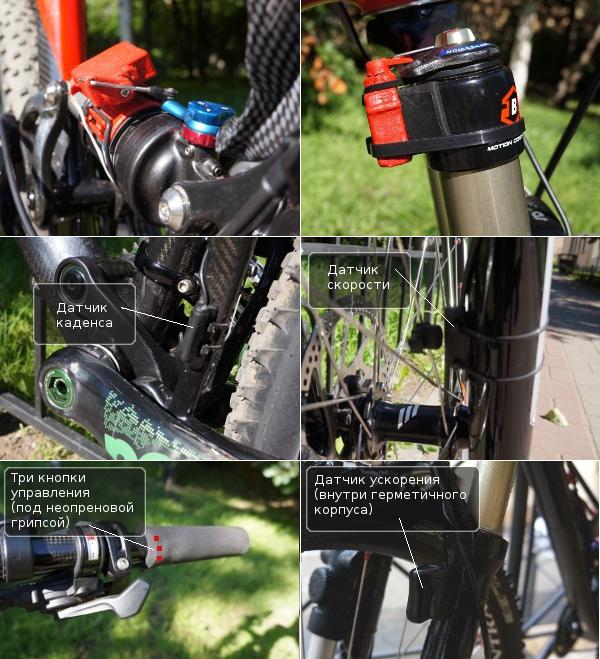
The system using sensors:
sprung acceleration sensor (in stock forks) unsprung acceleration sensor (plug on the pants) skorostidatchik cadence sensor
Calculates the following indicators:
seriousness kochkiraskachku fork in the vertical plane and in the plane perpendicular to the slope dvizheniyuugol baykaskorostkadens And on the basis of these parameters choose the desired state, passing from one to another:
Source:
So, this article will focus on the development of the domestic electronic control suspension mountain bike. I will not torment the long entry, right to the photos and videos:
12 pictures + description + video examples


Now the details.
Problem:
With active pedaling on the bike dvuhpodvesnom spent a large proportion of the energy build-up rider on a bike suspension, this is true for both the rear and front suspension. The rear suspension is subject to the buildup almost always, the front suspension is mainly exposed when pedaling "standing." To make it clearer, imagine that you are standing next to the mountain bike that has a suspension fork and hands pressed cyclically / presses plug to the ground. To do this, you are wasting your energy the same way your energy is spent completely useless when you pedaliruete intensively (eg a mountain). That is, if it were not "swinging" shock absorbers, all the energy goes to the beneficial business - pedaling.
To solve this problem have been developed and implemented by different manufacturers are numerous mechanical suspension system damping swinging. Such as Motion Control by RockShox and Terralogic c ProPedal by FOX and others.
We can not agree that such mechanical systems certainly improve the efficiency of pedaling, but still does not completely eliminate power dissipation, since all of these solutions are "passive».
In other words, the mechanical systems do not account for different environmental conditions, such as:
DvizheniyaKadens speed (cadence) The nature of the road surface is why, in recent years the major bicycle manufacturers have developed "active" suspension control systems that take into account the above ambient conditions, thanks to the different sensors:
Reed speed and kadensaDatchiki uskoreniyaIdeya:
As usual it was adopted in our country, the problem was posed as follows: "To surpass foreign analogues in performance characteristics in a few times!". Namely, that those foreign goods had to catch up technologically and overtake on the following parameters:
EffektivnostGabarityVesVozmozhnost pairing system with bluetooth устройствамиИнтеллектуальностьДешевизнаДоступностьЛегкость installation on existing equipment (fork and Amort) with a minimum модификациейРемонтопригодностьОтказоустойчивостьВозможность modifications of hardware (upgrade) The ability to modify the software part (upgrade) Hours from one zaryadaChego achieved:
1. Efficiency
Firstly, in contrast to foreign analogues, control is simultaneously the front and rear suspension.
Second, the hardware (MCU) allows you to implement any algorithms for managing suspension, using public funds, namely the programming language C ++.
2. Dimensions
Specially selected components are so small that they allow to place them in the stock fork. That is the "brain" and the battery are placed directly in the free space stock fork.
Thus the size of the control element does not exceed 200mm in length and 22mm in width. The real dimensions are approximately: 150h19.
The result is an elegant solution, which can not even see, and most importantly, nothing sticks out and does not take the right place as it is done here (bulky battery pack is attached in place of vital water bottles with water):

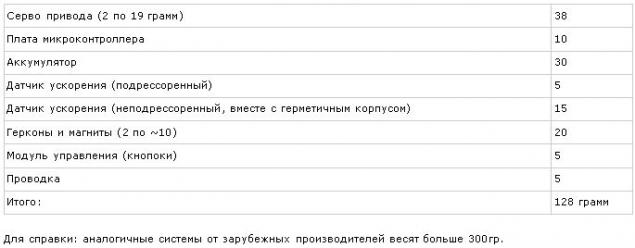
3. Weight
For those who are unfamiliar with cycling I will explain that the weight is one of the basic indicators for critical equipment used in bicycle competitions. For this reason, the criterion was allocated special attention. As a result, weight gain about 120 grams. In this part:

4. Intellectual
Sensors and programmable microcontroller to implement any algorithm in a high level language c ++. As a result, the following features are implemented at the moment:
Manual
In this mode the user can control locks the front and rear shock absorbers (together or separately) through the buttons located under the neoprene grips (a rubber knob on the steering wheel). The work of this regime can be seen in the video above. Despite its simplicity, this option is very convenient and useful feature, because the levers lock shock is very difficult to twist arms when moving the bike, especially at high speeds.
Semi-automatic mode
Mostly, this mode is designed for new shock absorbers from the company FOX, which have levers CTD. The basic idea for this mode was the involvement in the maximum mechanical characteristics of the shock absorbers. That is the system, depending on the sensor must select one of three modes CTD (Climb-Trail-Descent), giving all at the mercy of the logic of optimization of the shock absorbers on themselves. The mode is selected by turning the actuator at a certain angle corresponding to a particular operating mode of the shock absorber.
At this point, CTD modes are selected on the basis of the angle of the bike. In other words how it works:
Bike riding uphill - included Climb rezhim.Bayk travels in a straight line - Trail rides rezhim.Bayk the mountain - Descent mode. Limits transition from mode to set (the catch inclination in degrees). Also, the transition from the timeout mode to also configurable.
This mode has been designed specifically for a highly respected rider (will not be named, because the agreement is), but at the last moment he changed his sponsor, and installation of the system on its new bike has become impossible.
Here's how it works:
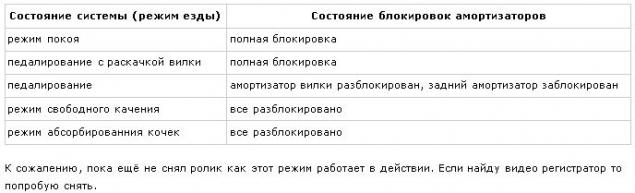
Automatic mode
It is the most interesting and complex mode, is designed as a way to increase the maximum pedaling efficiency by intelligent on / off damper lock it is in those moments when you need it.
For the implementation of the regime have been allocated a number of possible states of the system and the rules of transition between them, in short, it looks like:
The system using sensors:
sprung acceleration sensor (in stock forks) unsprung acceleration sensor (plug on the pants) skorostidatchik cadence sensor
Calculates the following indicators:
seriousness kochkiraskachku fork in the vertical plane and in the plane perpendicular to the slope dvizheniyuugol baykaskorostkadens And on the basis of these parameters choose the desired state, passing from one to another:

Source:
Tags
See also
BELAZ: automatic transmission, 300 liters per hour
"Smerch": the engine - V12, 650 "horses"
Lada Granta - began the first breakage.
Remote superintendent
People's Car Prokhorov
Large Monsters
Requiem for a "Volga" (lots of images and text)
The vital difference. ABS brakes and without
How to warm up a car in the cold?
Auto-show Super Car & Bike